ComNav 1101 Autopilot
Steering Along a Track
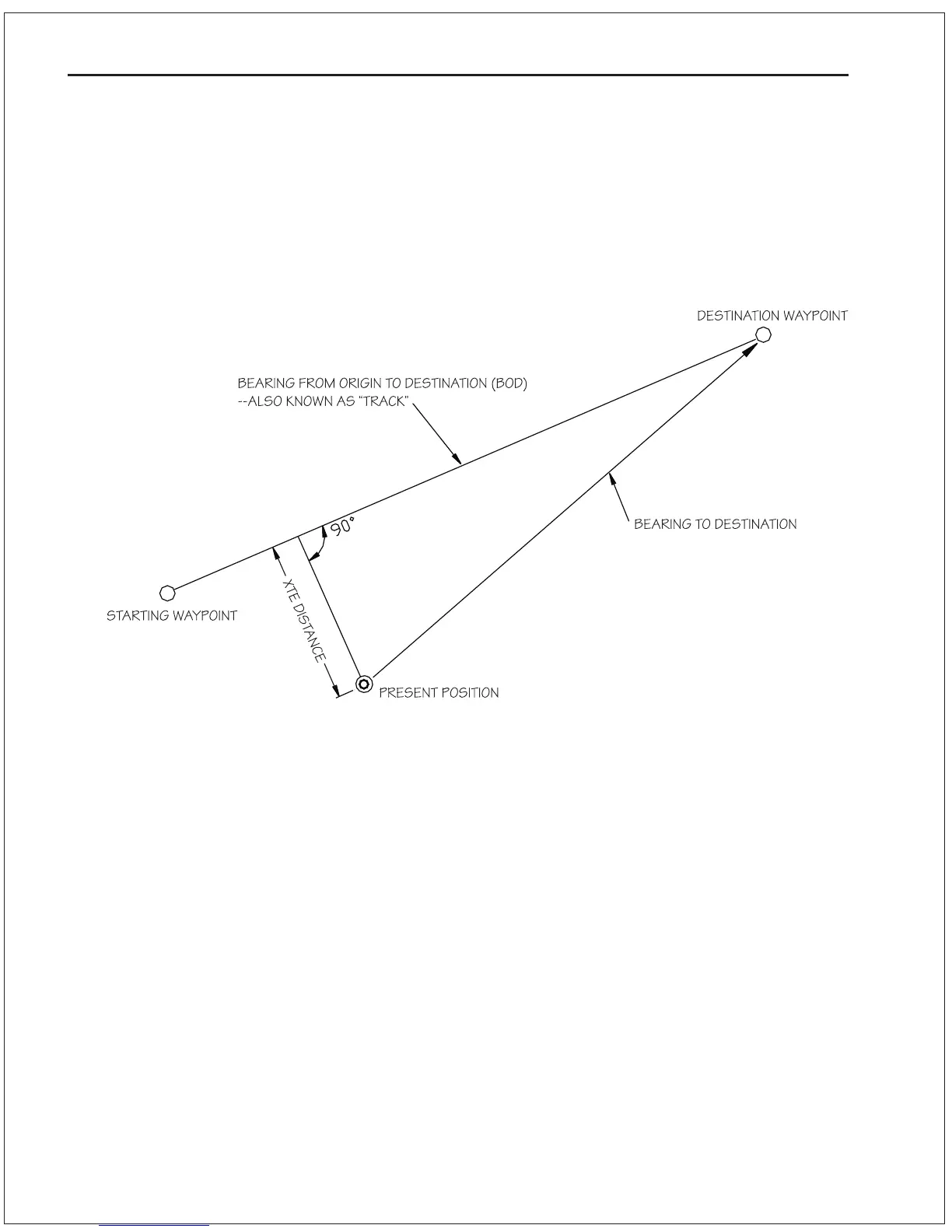
In this method of navigating, the Autopilot will bring the vessel onto
a track that is a straight line between the origin waypoint and the
destination waypoint. If the vessel is not already on this track, there
will be cross-track error. Cross track error is the perpendicular
distance from the track to the vessels position.
When steering along a track, the Autopilot tries to minimize cross-
track error by steering to a heading that lies between the perpen-
dicular to the track and the destination waypoint. The farther you
are off track, the closer to the perpendicular the heading will be. As
you come closer to the track, the heading of the vessel will change
closer to the heading of the track. When you are on-track, the
vessels heading and the track heading will be identical.
7 - 3 ADVANCED OPERATIONS
Figure 16Representation of Track and Bearing to Destination