DVP-ES2/EX2/EC5/SS2/SA2/SX2/SE&TP Operation Manual - Programming
-174
Program Example 2:
Robot arm control (by IST instruction):
1. Control purpose:
Select the big balls and small balls and move them to corresponding boxes. Configure the
control panel for each operation.
2. Motion of the Robot arm:
lower robot arm, clip balls, raise robot arm, shift to right, lower robot arm, release balls, raise
robot arm, shift to left to finish the operation cycle.
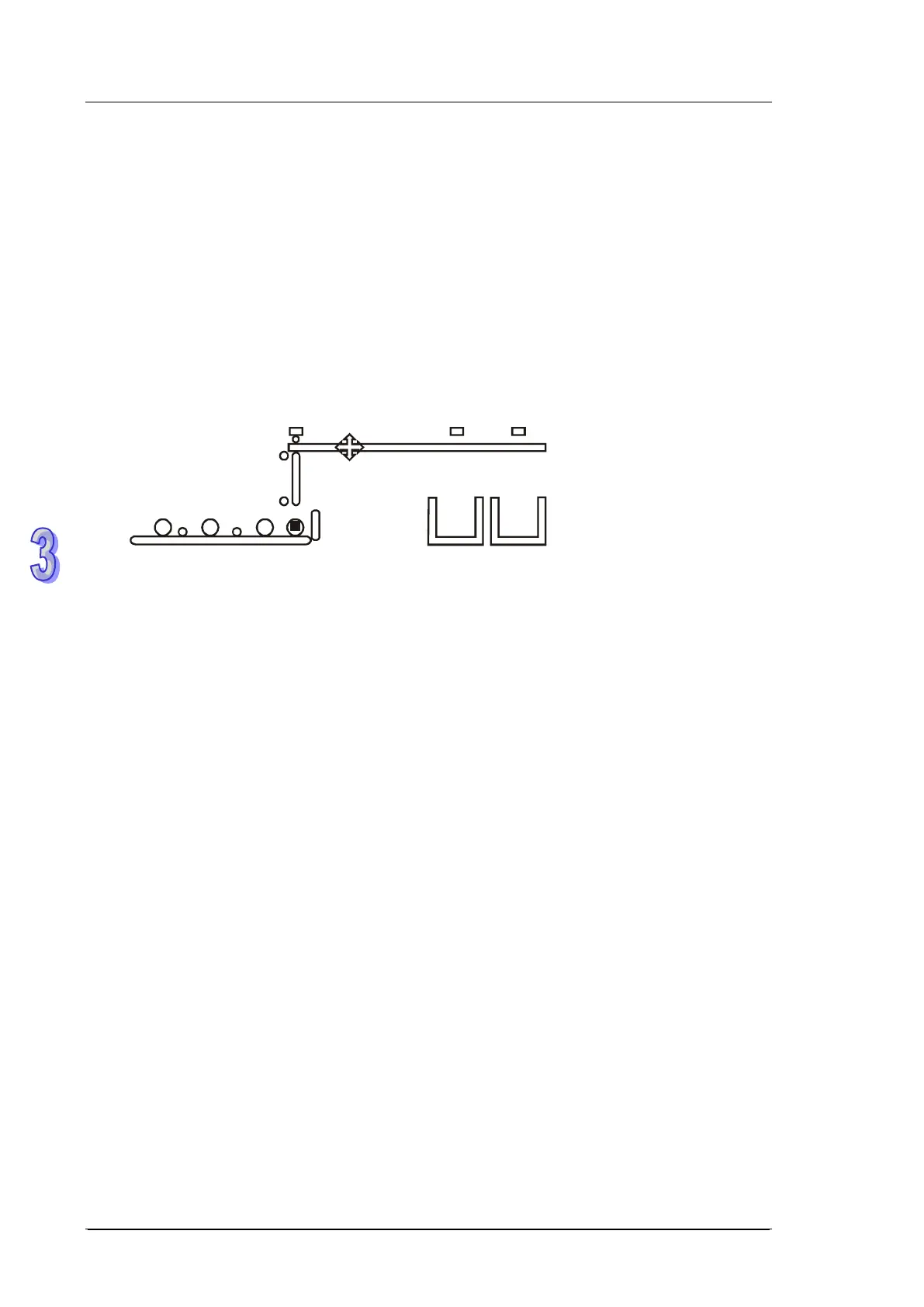
3. I/O Devices
Y0
Y1
Y2Y3
Left-limit X1
Upper-limit X4
Upper-limit X5
Right-limit X2
(big balls)
Right-limit X3
(small balls)
Big
Small
Ball size
sensor X0
4. Operation mode:
Single step: Press single button for single step to control the ON/OFF of external load.
Zero return: Press zero return button to perform homing on the machine.
Auto (Single step / One cycle operation / Continuous operation):
Single step: the operation proceeds with one step every time when Auto
ON is pressed.
One cycle operation: press Auto ON at zero position, the operation
performs one full cycle operation and stops at zero point. If Auto OFF is
pressed during the cycle, the operation will pause. If Auto ON is pressed
again, the operation will resume the cycle and stop at zero point.
Continuous operation: press Auto ON at zero position, the operation will
perform continuous operation cycles. If Auto OFF is pressed, the
operation will stop at the end of the current cycle.