Chapter 12 Descriptions of Parameter SettingsC2000 Plus
12.1-11-9
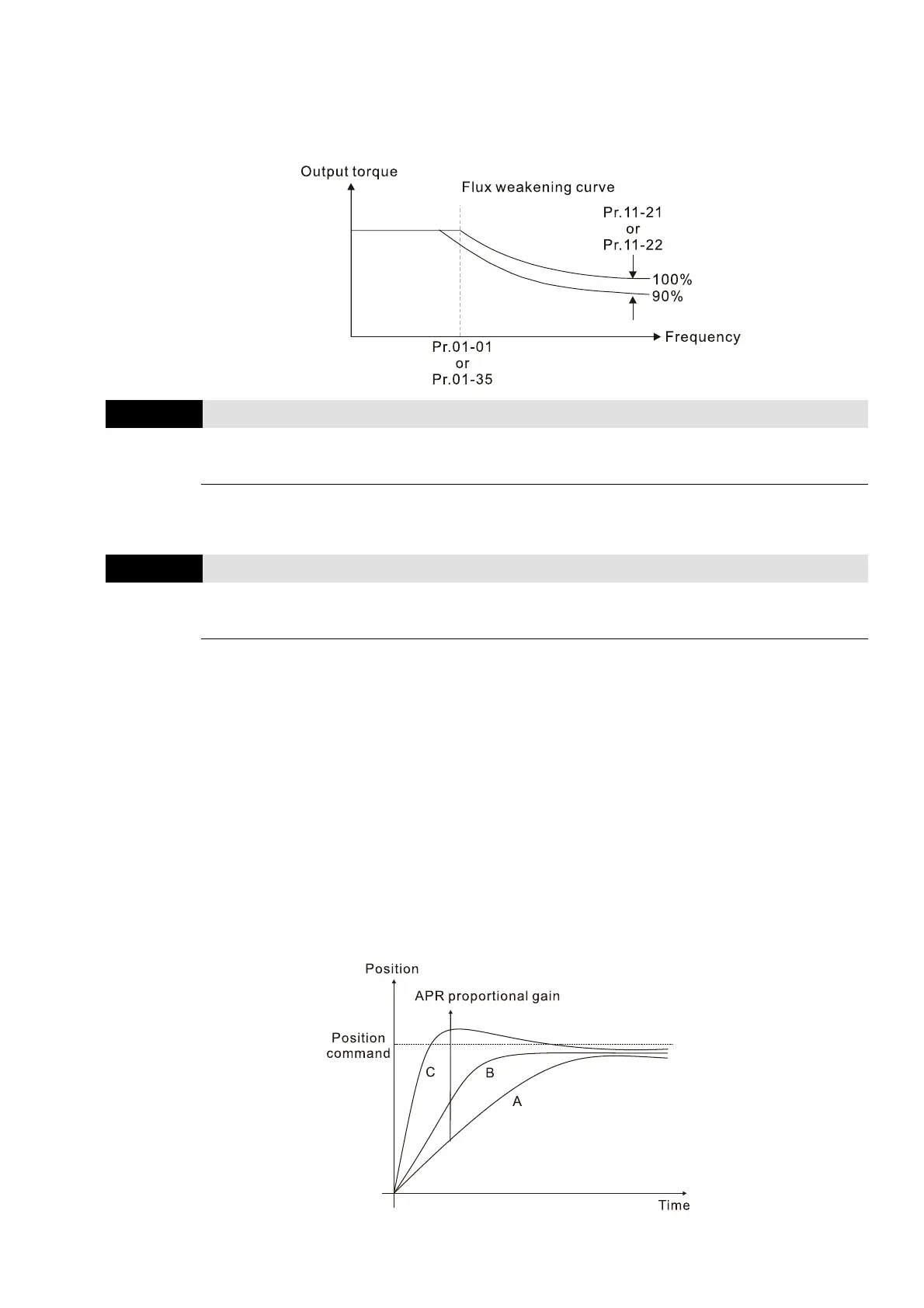
3. Adjust the Pr.11-21 (motor 1) or Pr.11-22 (motor 2) setting to make the output voltage reach
the motor rated voltage.
4. The larger the setting value, the greater the output voltage.
11-23
Flux Weakening Area Speed Response
Default: 65
Settings 0–150%
Control the speed in the flux weakening area. The larger the value, the faster the acceleration /
deceleration. In normal condition, you do not need to adjust this parameter.
11-24
APR Gain
Default: 5.00
Settings 0.00–40.00 Hz (IM) / 0.00–100.00 Hz (PM)
Define the Kp gain for the Automatic Position Regulator (APR). The larger the APR proportional
gain, the higher the position loop response bandwidth.
A large APR proportional gain causes a smaller phase margin, further making the motor oscillate
back and forth. In this case, decrease the APR proportional gain value until the oscillation stops.
If the APR proportional gain is getting smaller, the motor stiffness is lower when the motor stops.
The smaller the APR proportional gain, the lower the motor stiffness when positioning.
If increasing APR proportional gain does not meet your application even APR proportional gain is
much larger than ASR speed bandwidth, adjust ASR speed bandwidth to a suitable value before
adjusting APR proportional gain.
The actual position curve when increasing the APR proportional gain: from A to C (C > B > A). The
dotted line is the position command, as shown in the diagram below.