Chapter 12 Description of Parameter SettingsCP2000
12.1-08-2
Analog Input Selection (AVI1)
Default: 1
Analog Input Selection (ACI)
Default: 0
Analog Input Selection (AVI2)
Default: 0
Settings 4: PID target value
Common applications for PID control
1. Flow control: Use a flow sensor to feedback the flow data and perform accurate flow
control.
2. Pressure control: Use a pressure sensor to feedback the pressure data and perform
precise pressure control.
3. Air volume control: Use an air volume sensor to feedback the air volume data to achieve
excellent air volume regulation.
4. Temperature control: Use a thermocouple or thermistor to feedback temperature data for
comfortable temperature control.
5. Speed control: Use a speed sensor or encoder to feedback motor shaft speed or input
another machine speed as a target value for closed loop speed control of the master-slave
operation. Pr.10-00 sets the PID set point source (target value).
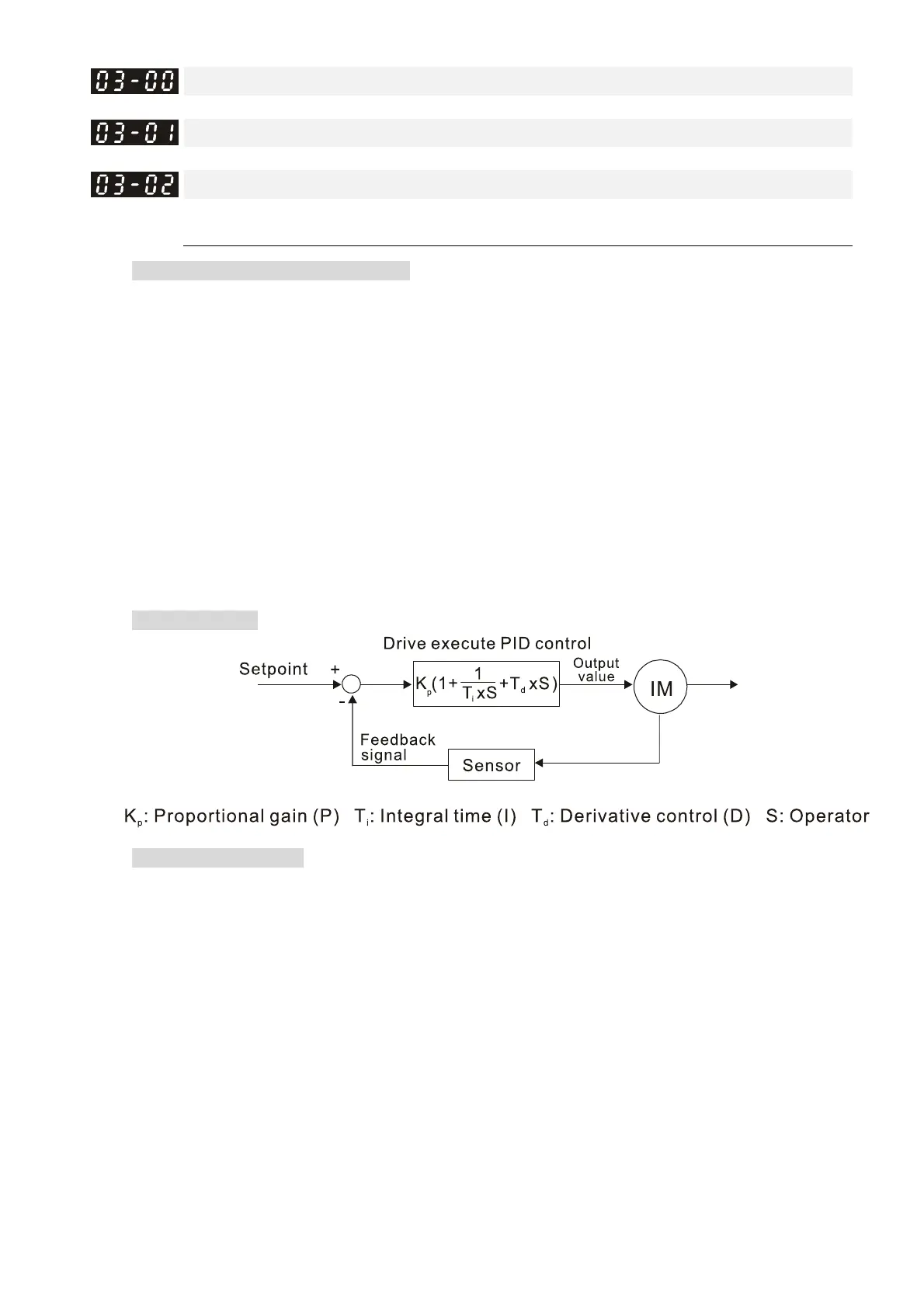
PID control loop:
Concept of PID control
Proportional gain (P):
The output is proportional to input. With only proportional gain control, there is always a
steady-state error.
Adjustment: Turn off the Ti and Td, or remain Ti and Td in constant value, then adjust the
proportional gain (P).
Increase: Faster status feedback, but excessive adjustment will increase the overshoot.
Decrease: Smaller overshoot, but excessive adjustment will slow down the transient
response.
Integral time(I):
The controller output is proportional to the integral of the controller input. To eliminate the
steady-state error, add an “integral part” to the controller. The integral time controls the
relation between integral part and the error. The integral part increases over time even if