Chapter 12 Description of Parameter SettingsMS300
460
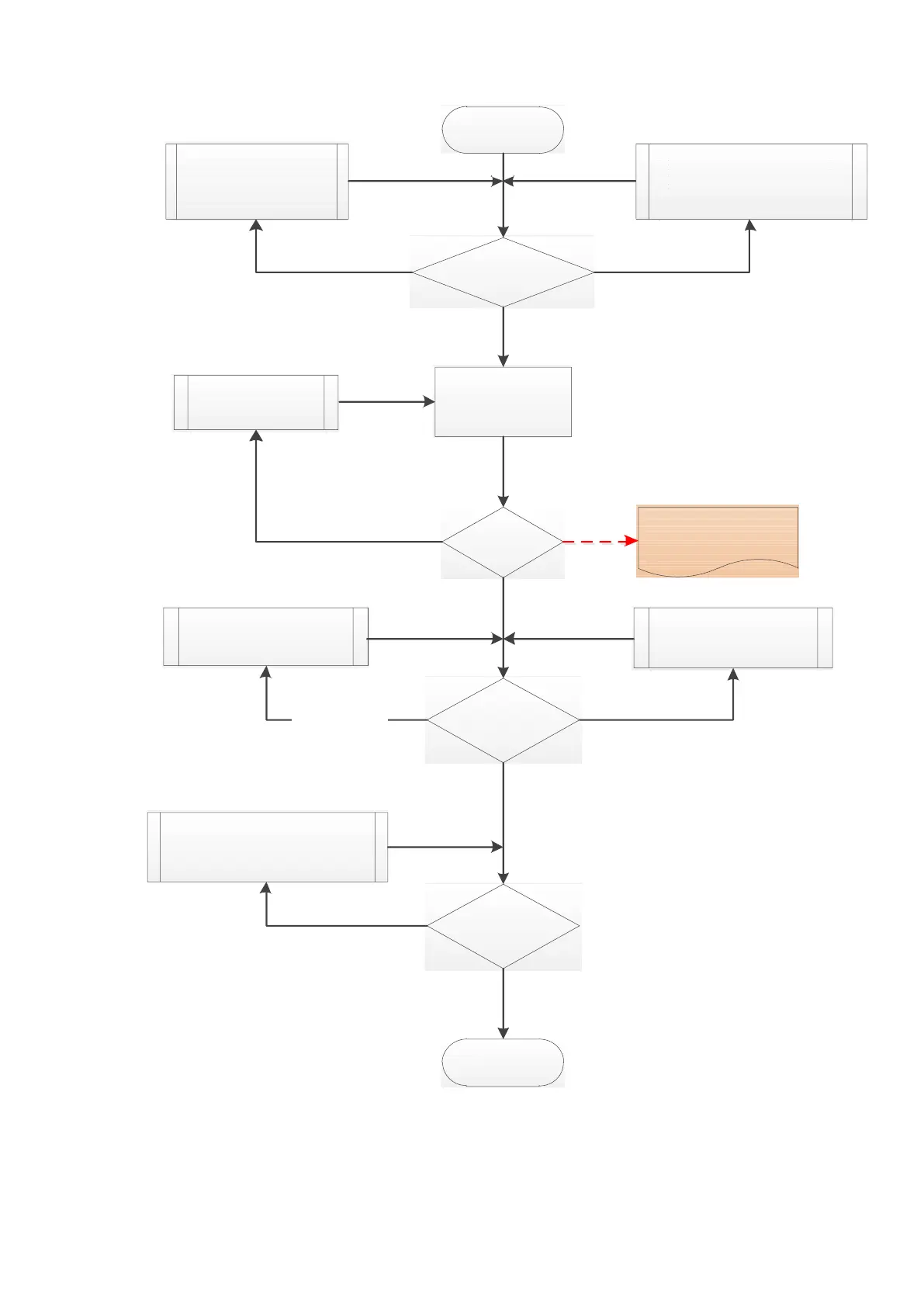
(2) PM SVC adjustment flowchart for operation with no load / light load
NO
8. No-load
Running
A1. Start running
direction is
correct?
YES
SPM > Increase Pr.10-42
Initial angle detection pulse
value
IPM > Increase Pr.10-52
Injection magnitude
Start running
direction error
A2. No-load current
runs with ½ of rated
rotor speed
No-load running
current is normal?
Increase torque offset
Pr.07-26
No-load current is too high
A3. Acceleration to
rated frequency is
stable?
Increase low-pass filter gain
Pr.10-34
Increase speed estimation
bandwidth Pr.10-32
Output frequency
Periodic low-frequency wave
A4. Reach
max. output
frequency?
Increase low-pass filter gain Pr.10-34
Increase carrier frequency Pr.00-17
(Carrier frequency need to be >10
times of the max. output frequency)
Motor stall at max.
rotor speed
NO
NO
NO
9. Running Test
with Load
YES
YES
YES
角度偵測脈衝頻寬
Press RUN, then ocA
(over current) occurs
SPM > Decrease Pr.10-42
Initial angle detection pulse value
(Too high pulse bandwidth may
cause ocA)
Increase low-pass filter gain
Pr.10-34
Decrease speed estimation
bandwidth Pr.10-32
Strongly high-frequency
vibration of output frequency
No-load current is
10%~20% of rated
current range