Chapter 15 CANopen Overview C2000 Plus
15-27
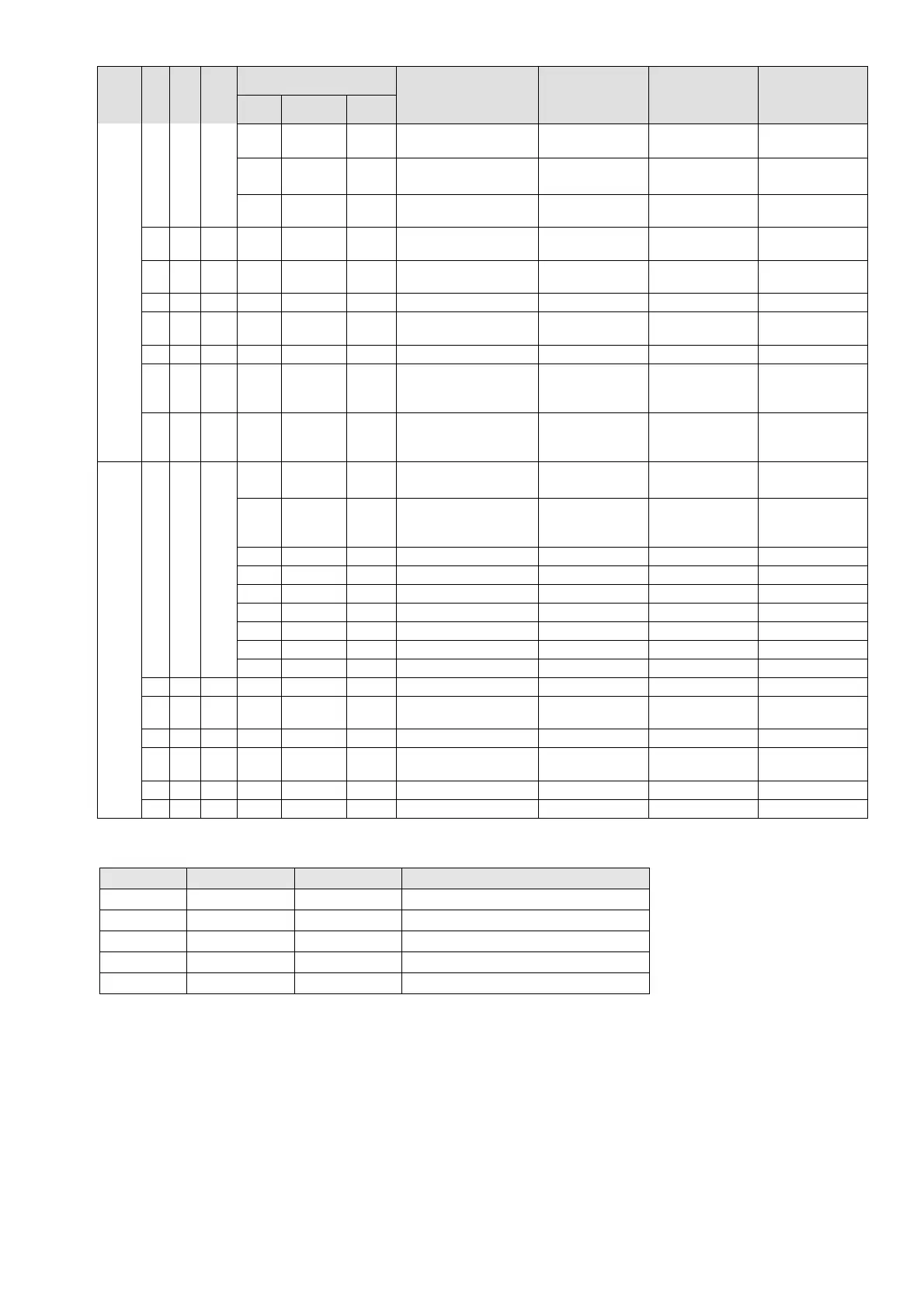
Index sub R/W Size
Descriptions
Speed Mode Position Mode Home Mode Torque Mode
bit DefinitionPriority
9
Ext Cmd2 4
01: Absolute
position cleared
0->1: Absolute
position cleared
0->1: Absolute
position cleared
0->1: Absolute
position cleared
10–14
Reserved
15
RST
Pulse 1: Fault code
cleared
Pulse 1: Fault
code cleared
Pulse 1: Fault
code cleared
Pulse 1: Fault
code cleared
02h RW U16
Mode
Cmd
0: Speed mode
1: P2P position
mode
3: Home mode 2: Torque mode
03h RW U16
Speed command
(unsigned decimal)
04h RW U16
05h RW S32
Position
command
06h RW
07h RW U16
Torque
command
(signed decimal)
08h RW U16
Speed limit
(unsigned
decimal)
2061h
01h R U16
0
Arrive
Frequency command
reached
Position attained Homing complete Torque attained
1
Dir
0: Motor FWD run
1: Motor REV run
0: Motor FWD
run
1: Motor REV run
0: Motor FWD
run
1: Motor REV run
0: Motor FWD
run
1: Motor REV run
2
Warn Warning occurs
Warning Warning Warning
3
Error Error detected
Error detected Error detected Error detected
4
5
JOG JOG JOG JOG JOG
6
Qstop Quick stop Quick stop Quick stop Quick stop
7
Power On Switch ON Switch ON Switch ON Switch ON
15–8
02h R
03h R U16
ctual output
frequency
ctual output
frequency
ctual output
frequency
ctual output
frequency
04h R
05h R S32
ctual position
(absolute)
ctual position
(absolute)
ctual position
(absolute)
ctual position
(absolute)
06h R
07h R S16
ctual torque
ctual torque
ctual torque
ctual torque
CANopen built-in PLC register D mapping(from D900–D999 mapping to 3000H–3063H)
Index Sub Property Definition
3000 0 RW PLC D900
3001 0 RW PLC D901
3002 0 RW PLC D902
… … RW …
3063 0 RW PLC D999