Chapter 16 PLC Function ApplicationsC2000 Plus
16-124
API
FREQ
S1 S2 S3
Drive speed control mode
142
P
Bit device Word device
16-bit command (7 STEP)
FREQ Continuous
execution type
FREQP Pulse
execution type
32-bit command
- - - -
Flag signal: M1015
X Y M K H KnX KnY KnM T C D
S1 * * *
S2 * * *
S3 * * *
Notes on operand usage: none
S1
: Frequency command.
S2
: Acceleration time.
S3
: Deceleration time
S2,S3: In acceleration/deceleration time settings, the number of decimal places is
determined by the definitions of Pr. 01-45.
Example
When Pr. 01-45=0: units of 0.01 sec.
The setting of 50 for S2 (acceleration time) in the ladder diagram below implies 0.5
sec,
and the S3 (deceleration time) setting of 60 implies 0.6 sec
The FREQ command can control drive frequency commands, and acceleration
and deceleration time; it also uses special register control actions, such as:
M1025: Control drive RUN(On) / STOP(Off) (RUN requires Servo On (M1040 On)
to be effective)
M1026: Control drive operating direction FWD(Off) / REV(On)
M1040: Control Servo On / Servo Off.
M1042: Trigger quick stop (ON) / does not trigger quick stop (Off).
M1044: Pause (On) / release pause (Off)
M1052: Lock frequency (On) / release lock frequency (Off)
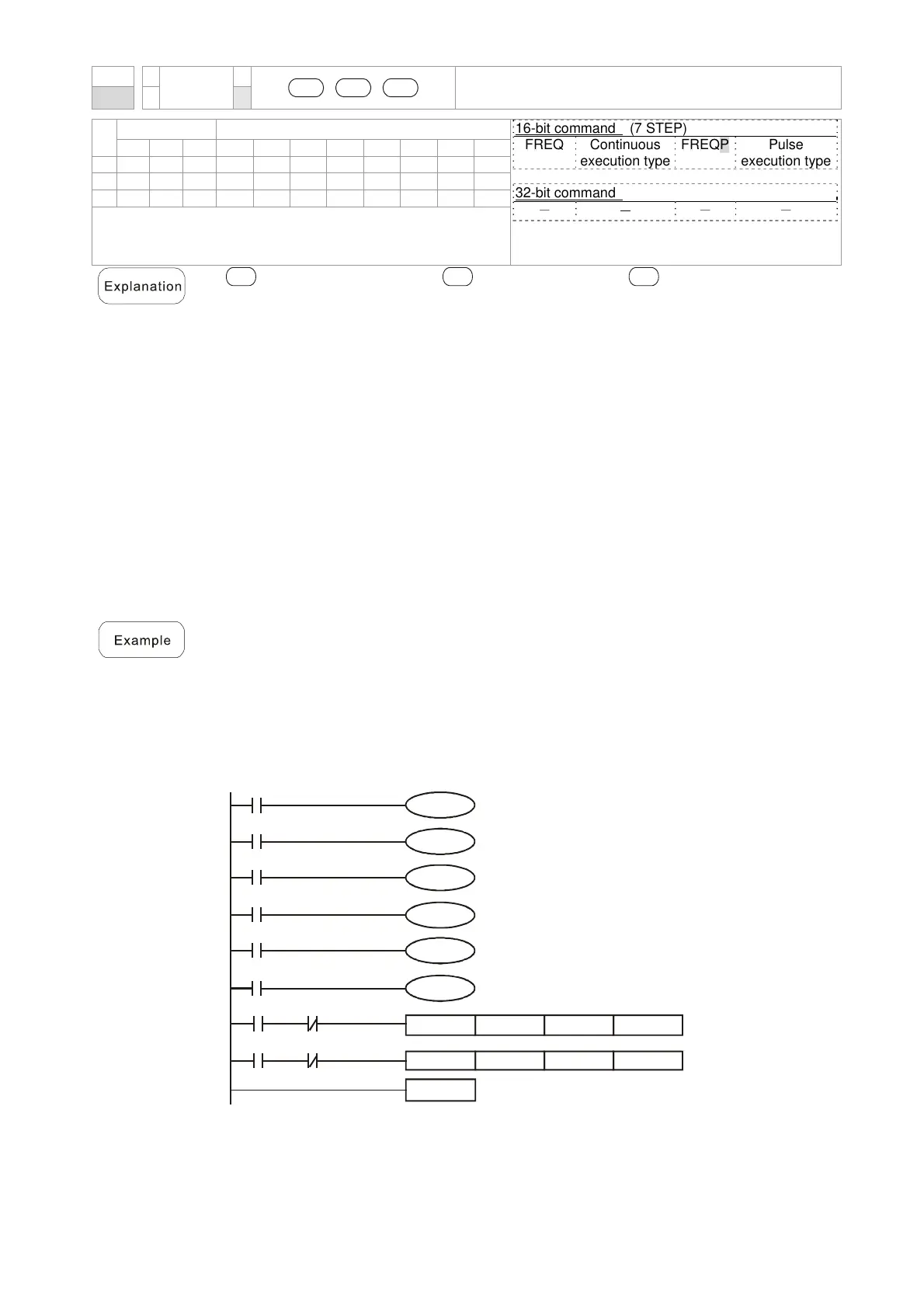
M1025: Drive RUN(On) / STOP(Off), M1026: drive operating direction FWD(Off) /
REV(On). M1015: frequency reached.
When M10=On, sets the drive frequency command K300 (3.00Hz), with an
acceleration / deceleration time of 0.
When M11=On, sets the drive frequency command K3000 (30.00Hz), with an
acceleration time of 50 (0.5 sec.) and deceleration time of 60 (0.6 sec.). (When Pr.
01-45=0)
When M11=Off, the drive frequency command will now change to 0
END
M13
M1044
FREQP
K300 K0 K0
FREQ
K3000 K50 K60
M11
M10
M10
M11
M1000
M1040
M12
M1042
M1000
M1025
M11
M1026
M14
M1052