ndi●
△00
理
脚
戸
︲
︲
︲
︲
a
一
h
一
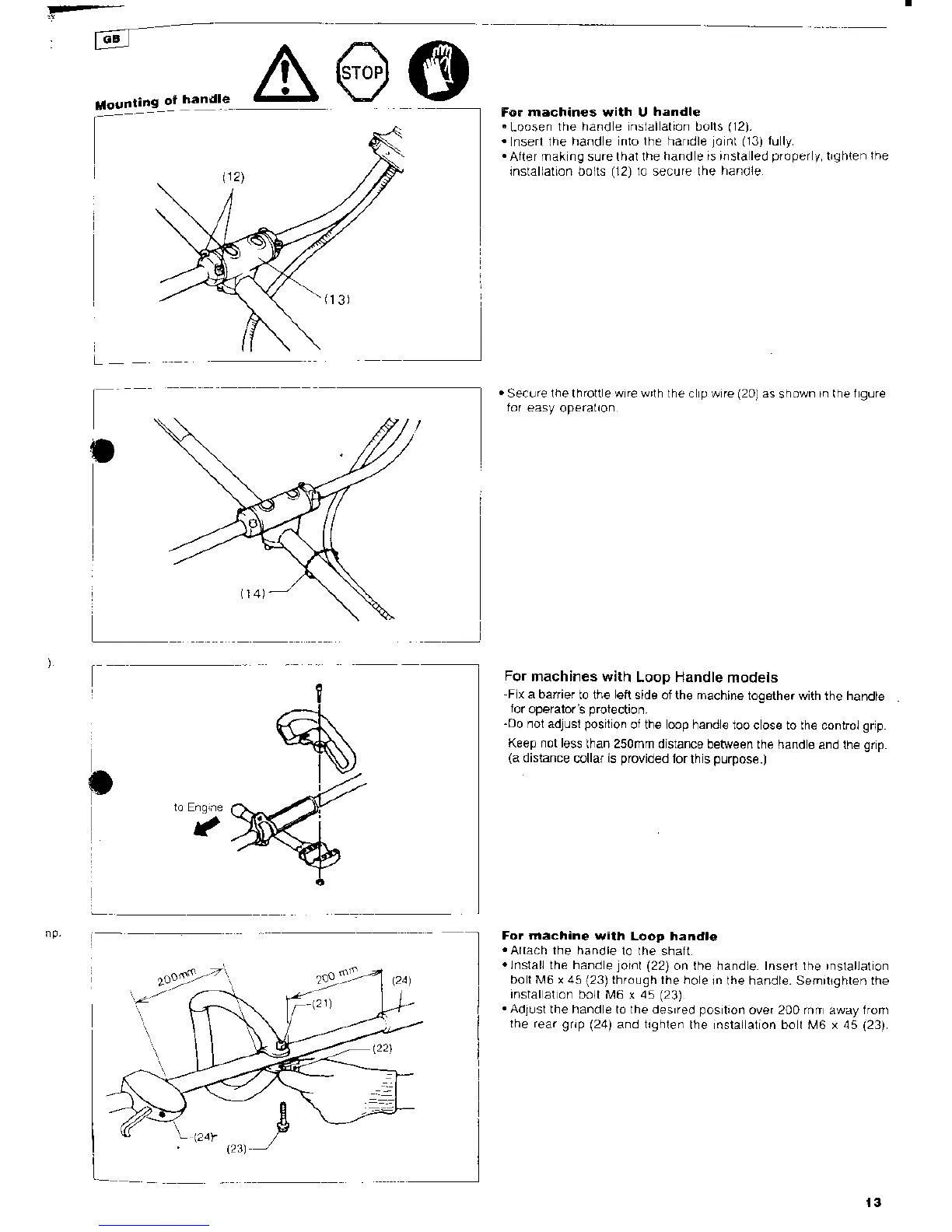
FormachineswitllUhヨ
ndte
。
しoosenthehandloinsta‖
ato口bots(12)
。
lnserithohandlointotheha「
dlojoint(13)fuHy
・
A■ormakingsurethal(hehandleisinsta‖odP「
op●rytgh(enihe
insta‖atonbots(12)(oseCur●thohanOlo
I
L
F
●
。
Securelhethr。(tlo、v「ew,lhthechp、,re(20)asshOヽ″ninthe119u「●
lo「easyoPeratlln
FormachineswvithLoopHandtemodets
―
Flxabarrortoth。loRsideofthemachinetogetherwththehandlo
子
oroperatorsprotettion
‐
Oo内
ot急
引
ustpostion。ltholoophandloiooclosetothecontrolgrp
KeeP内o(│。
ssthan250m「ndistancobetteerlthehandloandthegィ
P
(adiStancecowarisprovidediorthispurpose)
L
W
loE内
Oine
r
np十
﹁
︱
︱
︱
︱
︱
︱
︲
FormachinewithLooPhand3●
・
Attachthehandlolotheshait
。
lnsta‖thehandleJoint(22)。
nthehandleinserttheins(a向
310n
boにlt46x45(23)th「
oughthehoenい
ohandeSem19htenthe
nSta3Ⅲ
Onb01M6x45(23)
・
Adiustthohandlo(othedesredpostioぃ
ovo「2011rn「lawayl「o所、
therear9rp(24)andtightentheinsta‖
atonbo(小』6x45(23)
J
13