(
r
Application Guidelines
COUPLING
BELT
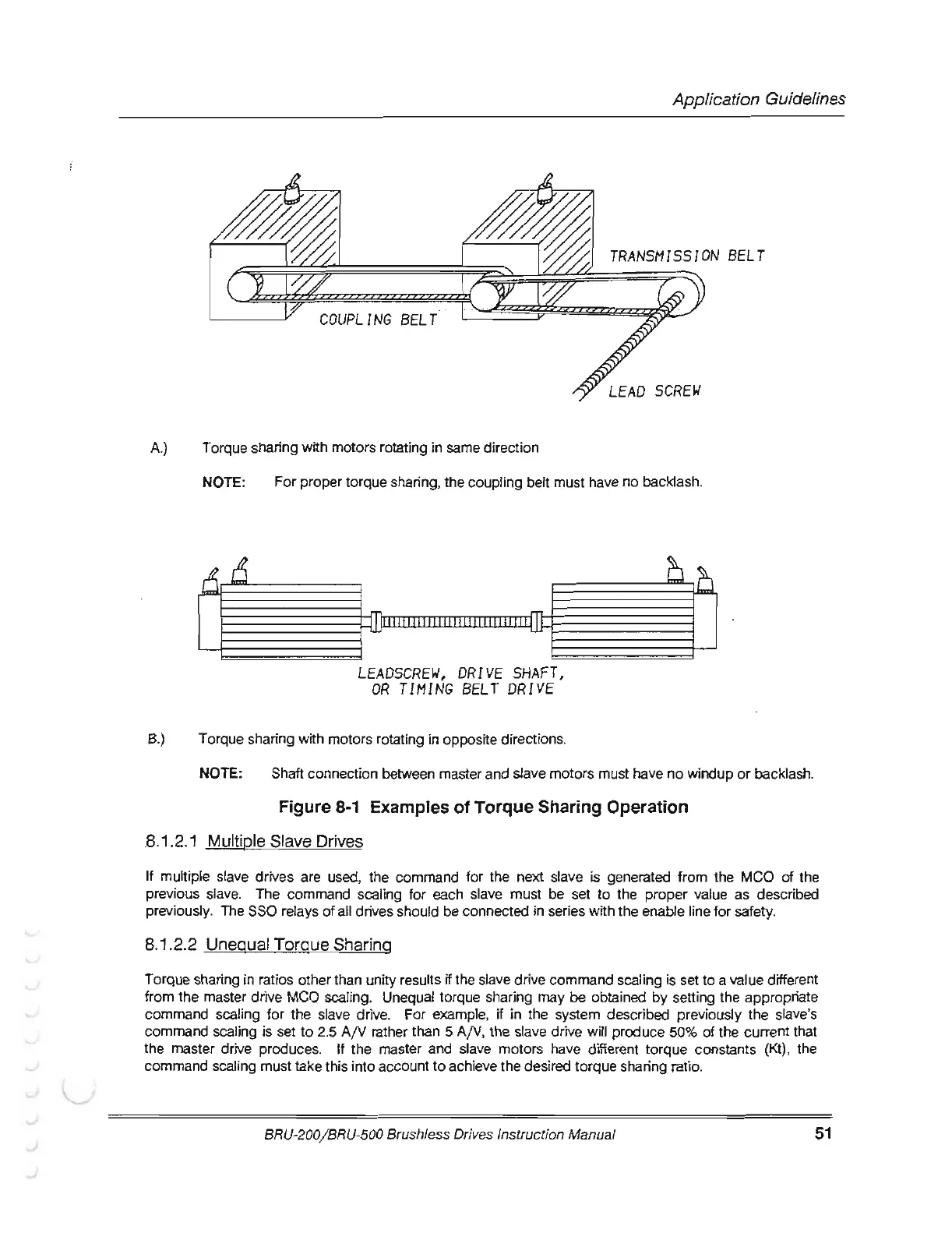
A.)
Torque sharing with motors rotating in same direction
NOTE:
For proper torque sharing, the coupling belt must have no backlash.
LEADSCREW,
DRIVE
SHAFT,
OR
TIMING
BELT
DRIVE
B.)
Torque sharing with motors rotating in opposite directions.
NOTE:
Shaft connection between master and slave motors must have no windup or backlash.
Figure 8-1 Examples of Torque Sharing Operation
.
8.1
.2.1 Multiple Slave Drives
If multiple slave drives
are
used, the command for the next slave is generated from the MCO
of
the
previous
slave.
The command scaling for each slave must be set
to
the proper value as described
previously. The
SSO
relays
of
all drives should be connected in series with the enable line for safety.
8.1.2.2 Unequal Torgue Sharing
Torque sharing in ratios other than unity results
if
the slave drive command scaling
is
set
to
a value different
from the master drive MCO scaling. Unequal torque sharing may be obtained
by
setting the appropriate
command scaling
for
the slave drive. For example,
if
in the system described previously the slave's
command scaling is set to
2.5
AjV
rather than 5 AjV, the slave drive will produce 50%
of
the current that
the master drive produces.
If the master and slave motors have different torque constants (Kt), the
command scaling must take this into account to achieve the desired torque sharing ratio.
BRU-200/BRU-500 Brushless Drives Instruction Manual
51
 Loading...
Loading...