910-0001-00-MAN-R06 FLIR Proprietary Information Page 69 of 81
Information contained in this document pertains to a Canadian origin product that is controlled as "dual use" by the Canadian
government. However, when in the United States or possessed by a US person, it may be considered a defense article from the US Government's
perspective. US government authorization may be required for re-transfer to a foreign person. If you have any questions, please contact FLIR's
Global Trade Compliance group at exportquestions@flir.com .
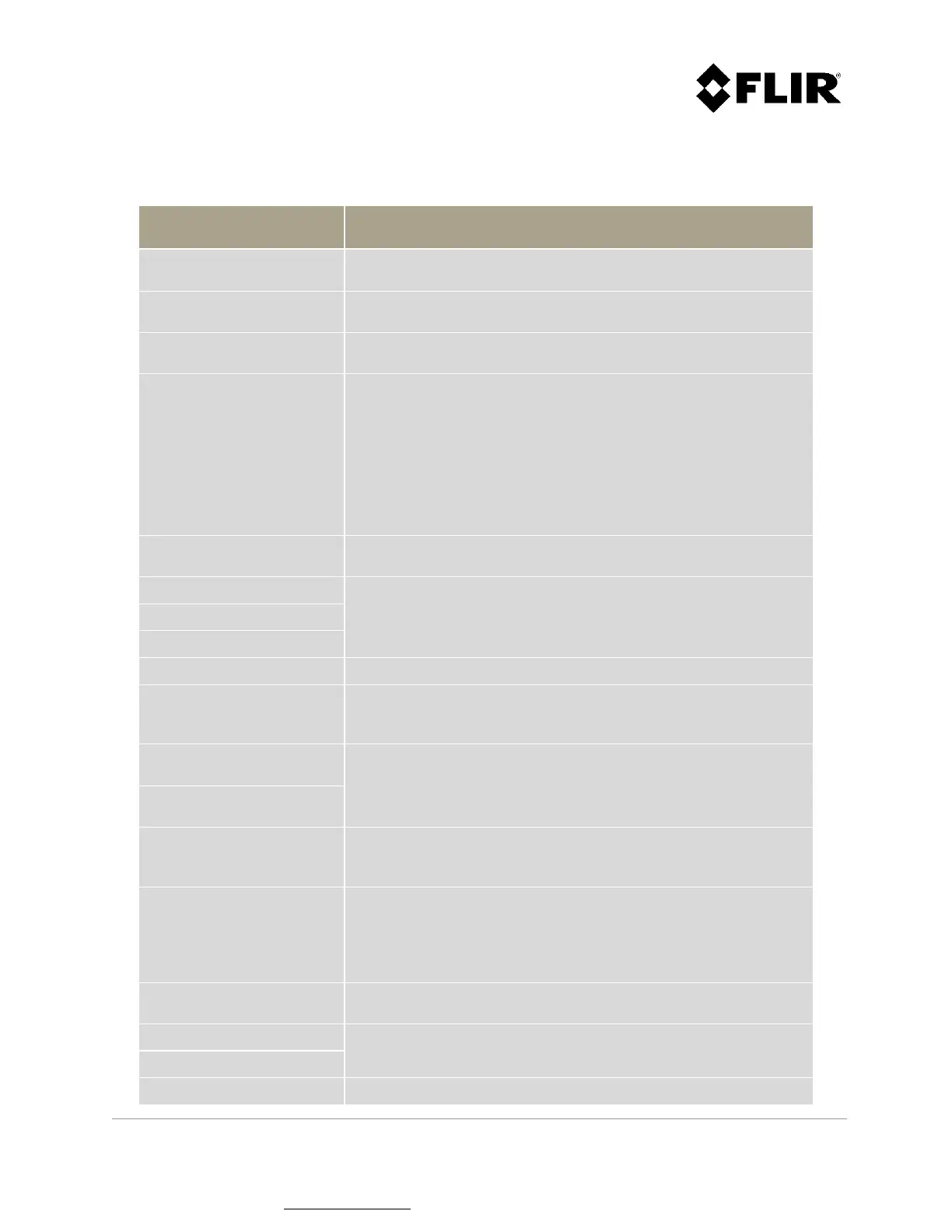
2.2.10.2 Parameter Descriptions
Parameter Name Description
ID Radar identification number. Can be any number between 1 and
65535.
IP Radar IP address. Refer to the Configuration Manual to determine
how to set this value properly.
Netmask Radar netmask. Refer to the Configuration Manual to determine
how to set this value properly.
Sync_method
Chirp_slot
Synchronization method and chirp slot used. Refer to the
Installation Manual to determine the appropriate synchronization
method and time slot.
Synchronization methods are:
0 (none)
1 (manual)
2 (GPS)
Azimuth_offset Azimuth offset value of the unit. Refer to the Installation Manual
to determine the azimuth offset.
Pos_lt
Radar location. The radar Installation Manual describes methods
to obtain the radar location.
Pos_lg
Elevation
Height
Radar installation height above ground.
Tilt Tilt angle value of the antenna. Refer to the Installation Manual
for instructions on how to optimize the antenna tilt angle for a
given environment.
TX_sector_1_start_cw
TX_sector_1_stop_cw
Transmit sectors 1 and 2 start and stop values (for FastScan
mode). Refer to the Installation Manual to set the number of
transmit sectors (1 or 2), and their positions.
TX_sector_2_start_cw
TX_sector_2_stop_cw
Data_link_speed Maximum data link speed between the radar and the Radar
Server application. This optional parameter can be set to
optimize PPI data transfer on a slow wireless network.
GPS_averaging If set, and if unit is equipped with a GPS receiver, averages the
GPS position to determine the unit location. This does not affect
unit’s position but starts GPS position averaging computation.
GPS position on unit status is displayed as [AVG] when
computation is completed.
Moving_base_config For the R20SS, enabling this parameter allows the use of the
pan/tilt positioner.
TX_sector_start_cw
Transmit sector. Used in Doppler mode only.
TX_sector_stop_cw
Dopplex_TX_sector_clip_dis
Disable TX sector clipping (long time-on-target mode only).
 Loading...
Loading...
