IN A
IN A
m/min
Revolution
Motor
Velocity (m/min)
rpm
HH
H
GO
L
LL
HH
H
GO
L
LL
IN A
HOLD
t2t1 t3
Total Counted
Value
(1/t1)×α (1/t2)×α(1/t3)×α Keep (1/t3)×α
Display
Example of Application
Display value
Frequency
Revolution
Hz
KHz
RPS
RPM
1
0.001
1
60
Display value & Units
Display value
Velocity
mm/s
cm/s
m/s
m/min
km/hour
1000 L
100 L
L (default)
60 L
3.6 L
Process
Operation
Length
Passing Time
Rotary
Encoder
HH
H
GO
L
LL
sec
IN B
IN A
t2t1 t3 t4 t5 t6 t7
HOLD
ta(Pause Time) : ta≥20 mS
t1 t3 Keep t4 t7
Display
Example of Application
Default of Prescale Value
: Time=1sec, Length=1m. L the Distance from IN A sensor to IN B (unit:m)
Mode : Moving Velocity (m/s)
Display the moving velocity from ON of IN A to ON of IN B.
Velocity(m/s): IN A Input Frequency(f) x value display. = L (m)
IN B
HOLD
t2ta ta ta ta tat1 t3 t4 t5 t6
ta(Pause Time) : ta≥20 mS
(1/t1)×α (1/t2)×α (1/t6)×αKeep (1/t4)×α
Display
IN A
Example of ApplicationDisplay value & Units
Units
Prescale Value( )
mm/s
cm/s
m/s
m/min
km/hour
1000 L
100 L
1 L (default)
60 L
3.6 L
Display
value
Cycle
Units
10
9.9999s
99.999s
999.99s
9999.9s
99999s
59.999s
59m59s.9
999m59s
9h59m59s
999h59m
60
Mode : Cycle
Display the input cycle (T) of IN A after measuring it
Cycle: IN A Input Cycle (t)
IN A
t2t1 t3 t4 t5 t6 t7
HOLD
ta(Pause Time) : ta≥20 mS
t1 t3 t4 t7
Display
Example of ApplicationDisplay value & Units
Display
value
Velocity
Units
10
9.9999s
99.999s
999.99s
9999.9s
99999s
59.999s
59m59s.9
999m59s
9h59m59s
999h59m
60
Display
value
Velocity
Units
10
9.9999s
99.999s
999.99s
9999.9s
99999s
59.999s
59m59s.9
999m59s
9h59m59s
999h59m
60
Mode : Passing Time (s)
Display the passing time the after measuring the input cycle (T)
Passing Time (sec): t x
Moving distance per 1 pulse = the circumference ( D) of the roller / N
(Pulse per 1 revolution of the encoder)
(prescale) = process operation length (m) x moving distance (m) per 1
Pulse
Prescale is the required pulse number in order to pass the process
operation.
Mode : Time Lag
Display the time from ON of IN A to ON of IN B after measuring it
Time Lag (T): t(IN A ~ IN B)
IN B
HOLD
t2ta ta ta ta tat1 t3 t4 t5 t6
ta(Pause Time) : ta≥20 mS
t1 t2 t6Keep t4
Display
IN A
Example of Application
Mode : Pulse Width (length)
Display the length after measuring the pulse of IN A while IN B is ON
Pulse Width = P x (P=Pulse of IN A, = prescale value)
HH
H
GO
L
LL
Rotary
Encoder
Length
cm
IN BIN A
IN A
ta
ta
IN B
ta(Pause Time) : ta≥20 mS
12 1234 1234
4×α2×α
Display
HOLD
Example of Application
Mode : Pulse Interval Coefficient (Interval
between objects)
Display the pulse of input IN A from the time when IN B is ON to the time
when IN is re-ON
Interval = P x (P=Pulse of IN A, = prescale value)
HH
H
GO
L
LL
Rotary
Encoder
cm
IN BIN A
Interval
IN A
ta
IN B
ta(Pause Time) : ta≥20 mS
12 12345 12
5×α2×α
Display
HOLD
Example of Application
Units
Prescale Value(
)
mm
cm
m
Quantity(EA)
1000
100
1
1
Display value & Units
Units
Prescale Value(
)
mm
cm
m
Quantity(EA)
1000
100
1
1
Display value & Units
Display value & Units
Display value & Units
Mode : Time Width
Display the time after measuring the time IN A is ON
Time Width (T): t
IN A
t2tat1 t3ta
HOLD
ta(Pause Time) : ta≥20 mS
t total counted value t1 t3
Display
Example of Application
Mode : Addition Counter (Coefficient)
It starts counting the pulse which inputs to IN A but it does not count the
pulse when IN B is ON.
If the RESET input is ON, then the counted value becomes
0.
Counter = P x (P=Pulse of IN A, =Prescale Value)
HH
H
GO
L
LL
Proximity Sensor
IN A
IN A
IN B
ta(Pause Time) : ta≥20 mS
12 67345 123
12 23345670 1
Display
Reset
Example of Application
If you input 0.1 to the prescale
value ( ) of IN A and apply the
dot position as then the
displayed value is increased by 1
for every 10 increment.
Example of Obtaining a
Prescale Value (no unit)
: The diameter of the revolving
object = D
The number of pulse per 1
revolution of the encoder = N
Process Operation Length = L
: Prescale Value ( ) = L/( D/N)
Display
value
Velocity
Units
10
9.9999s
99.999s
999.99s
9999.9s
99999s
59.999s
59m59s.9
999m59s
9h59m59s
999h59m
60
Display value & Units
BCD Dynamic Output
Output Value : Display value
Output Signal : BCD data (A, B, C, D) A : lowest Bit
Dot Point(Dot) Dot value of each Digit Data
Dot Data(D0, D1, D2, D3, D4) D0 : Lowest Digit,
D4 : Highest Digit
Output : NPN Open collector
Rated load voltage : 12-24 V d.c
Maximum load Current : 20
Low Speed Serial Output
Output value : display value
Output signal : CLK, Data, Latch
CLK cycle : 50 Hz
Number of output CLK bit
Number of output Data bit
Rated load valtage : 12-24 V d.c
Data Output order of serial Transmission
PV Transmission Output(4-20 mA d.c)
Use : Transmit measuring value to external equipment
Function : transmit a Measured value between high Output(PV-H)and
low Output(PV-L)
Setting range of High and Low Output
- High setting range (PV-H) : from minimum value to maximum value within
measuring range
- Low Setting range(PV-L): From Maximum value to minium value within
measuring range (Notice, PV-H must be bigger than PV-L by 1 at least)
- Load resistance : Max. 600
- Resolution : 10.000
RS-485 Communication Output
Address : 0 ~ 99(32 Channels)
Transmission Speed(Baud Rate) :
2400/4800/9600/19200 bps
Transmission code : Binary
Parity Bit : None
Data Bit : 8 Bit
Stop Bit : 1 Bit
Communication items
RP3-5A(D)5
PC : Set value, Clear for peak value, Reset control
RP3-5A(D)5
PC : Set value, Status value of control
H
H
H
H
H
D0
D1
D2
D3
D4
A
B
C
D
DOT
P V
H
H
H
H
H
H
H
H
H
H
H
L
H
H
H
L
L
H
H
L
H
H
L
H
H
L
H
L
H
H
L
H
H
H
H
1 2 43. 5
H
0.2ms 10ms
50ms
0.1ms
BCD
Data
Digit
10
0
Digit10
4
Digit
Example
In case of display value 123.45
5us
D1 D2 D3 D23 D24 D25 D1 D2 D3 D4
C1 C2 C3 C23 C24 C25 C1 C2 C3 C4
20ms
1ms
Data
Latch
~
~
~
DP(2)
MSB(1)
DP(1)
LSB(1)
LSB(2)
DP(3)
MSB(2)
LSB(3)
DP(4)
MSB(3)
LSB(4)
DP(5)
MSB(4)
LSB(5)
MSB(5)
START
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25
Shift
CLK
order
Segment
Data order
Data
(5
digit digit digit digit digit digit digit digit digit
)
Data
(4 )
Data
(3 )
Data
(2 )
Data
(1 )
Dot Point
(5 )
Dot Point
(4 )
Dot Point
(3 )
Dot Point
(2 )
Dot Point
digit
(1 )
10
4
Digit
10
0
Digit
4mA
20 mA
PV-H
Display Value
PV-L
Operating Mode
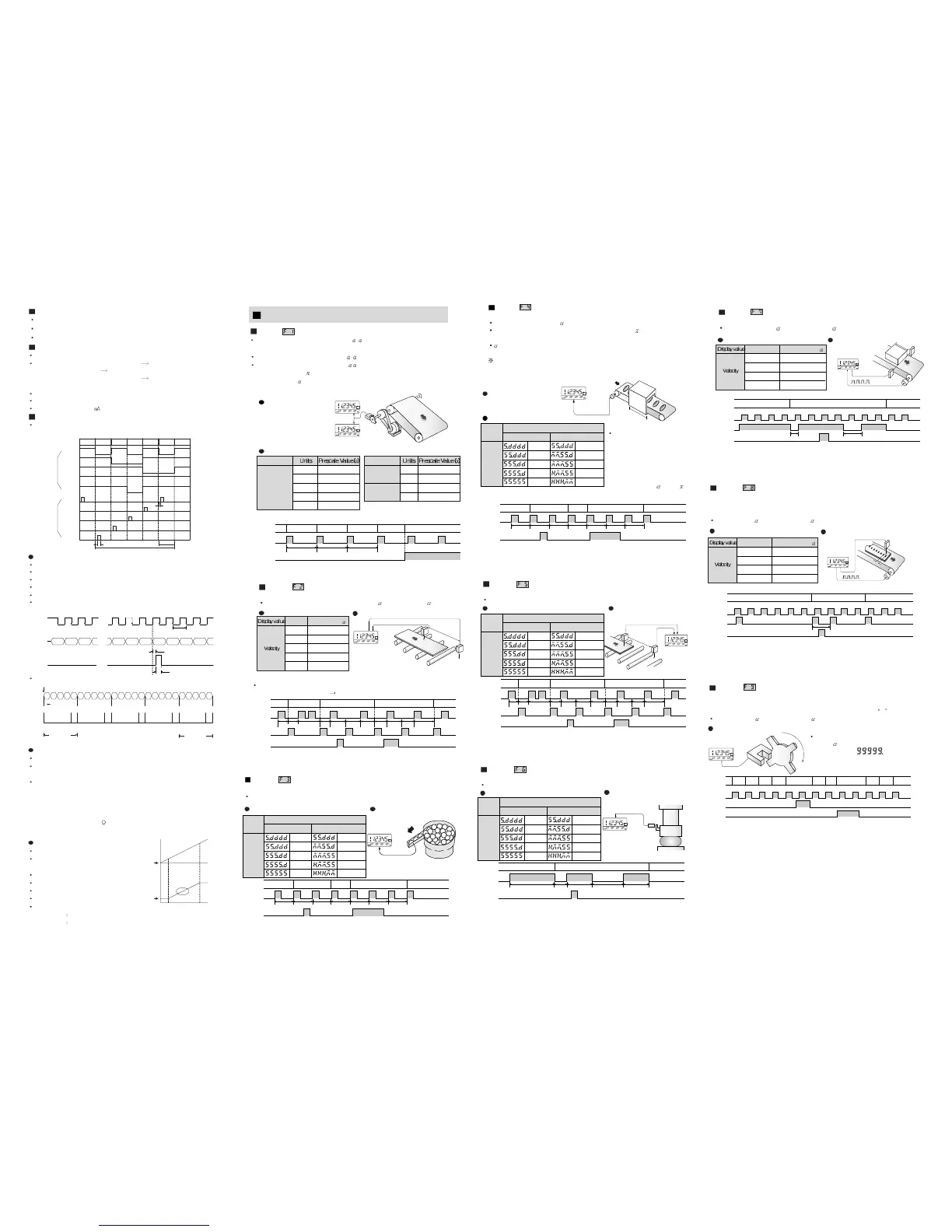
Mode : Frequency (Hz) / Revolution (rpm) / Velocity (m/s)
Revolution (RPM): IN A Input Cycle(f) x ( =60 x prescale value) display value
(default)
Frequency (Hz): IN A Input Cycle(f) x ( = prescale value) display value
Velocity (m/min): IN A Input Cycle(f) x ( =60 x L/N) display value
L =
D (circumference of the revolving object)
= prescale value, N = the number of waveform per 1 revolution
Non Contact Output
Power consumption : 500 mW
Output type : NPN Open collector
Load voltage : 12 - 24 V d.c

 Loading...
Loading...


