Chapter 7 Usage of Various Functions
7-
ే
(d) The expression of D action is as following;
dt
dE
TdKpMV ×=
(e) Derivative action is used only in PID action in which P and I actions combine with D action.
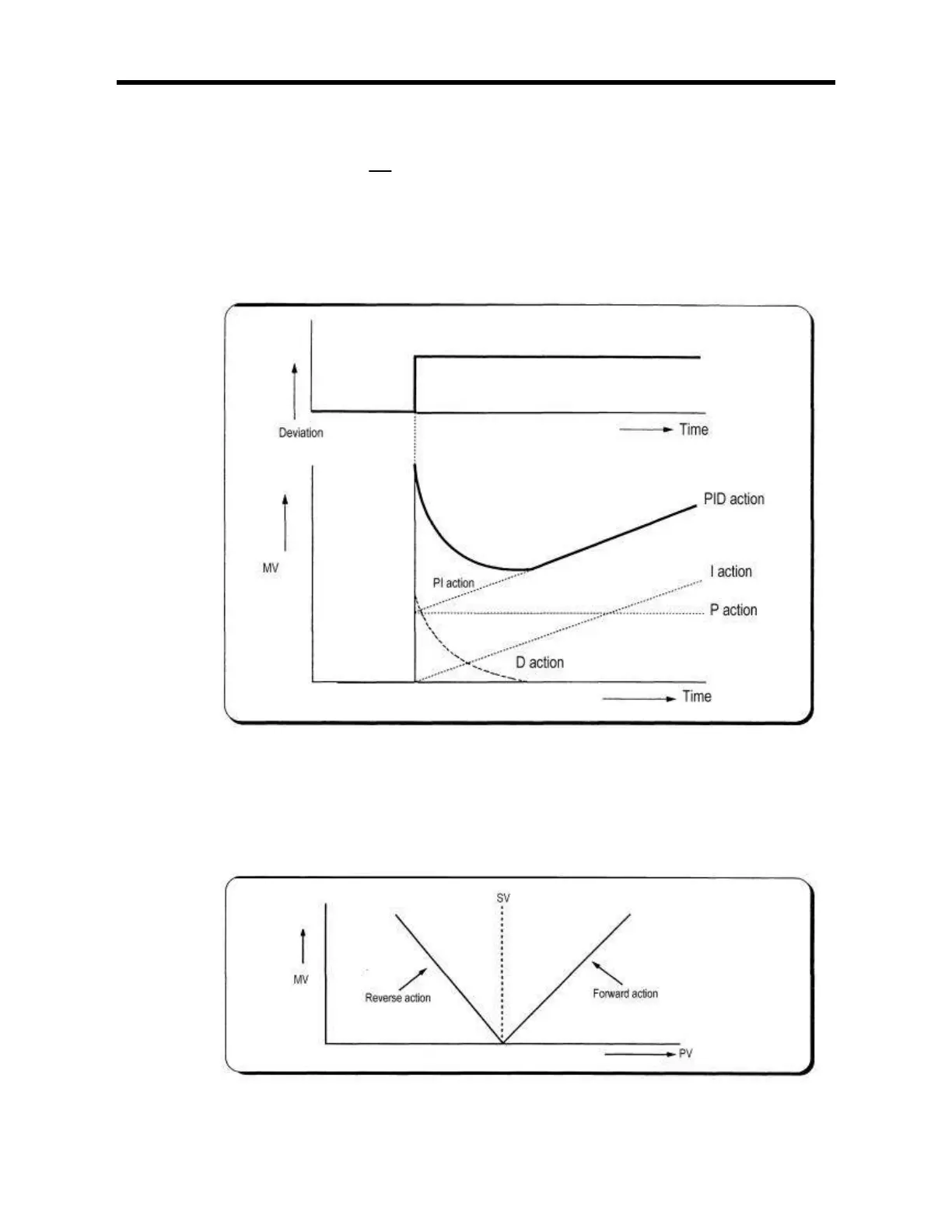
d) PID action
(a) PID action controls the control object with the manipulation quantity produced by (P+I+D) action
(b) PID action when a given deviation has occurred is shown as the following Fig. 2.8.
Fig. 2-8 PID action with a constant deviation
e) Forward / Reverse action
(a) PID control has two kind of action, forward action and reverse action. The forward action makes the PV
reaches to SV by outputting a positive MV when the PV is less than SV.
(b) A diagram in which forward and reverse actions are drawn using MV, PV and SV is shown as Fig. 2.9.
Fig. 2-9 MV of forward / reverse action