8/8
Err-12
Initial motor electrical angle
failure
ry 2 to 3 more times after power down
- if it still does not work, please replace the controller and inform the manufacturer.
Err-13
Motor HALL failure
Turn off the system power, check if the motor sensor plug is loose or dropped off,
restore it and restart the system. If it still does not work, please replace the controller
and inform the manufacturer.
Err-14
DSP Read/Write EEPROM
failure
Turn off the system power, restart the system after 30 seconds, if it still does not work,
please replace the controller and inform the manufacturer.
Err-15
Motor over-speed protection
Err-16
Err-17
HMI Read/Write
4 Pedal sensitivity adjustment
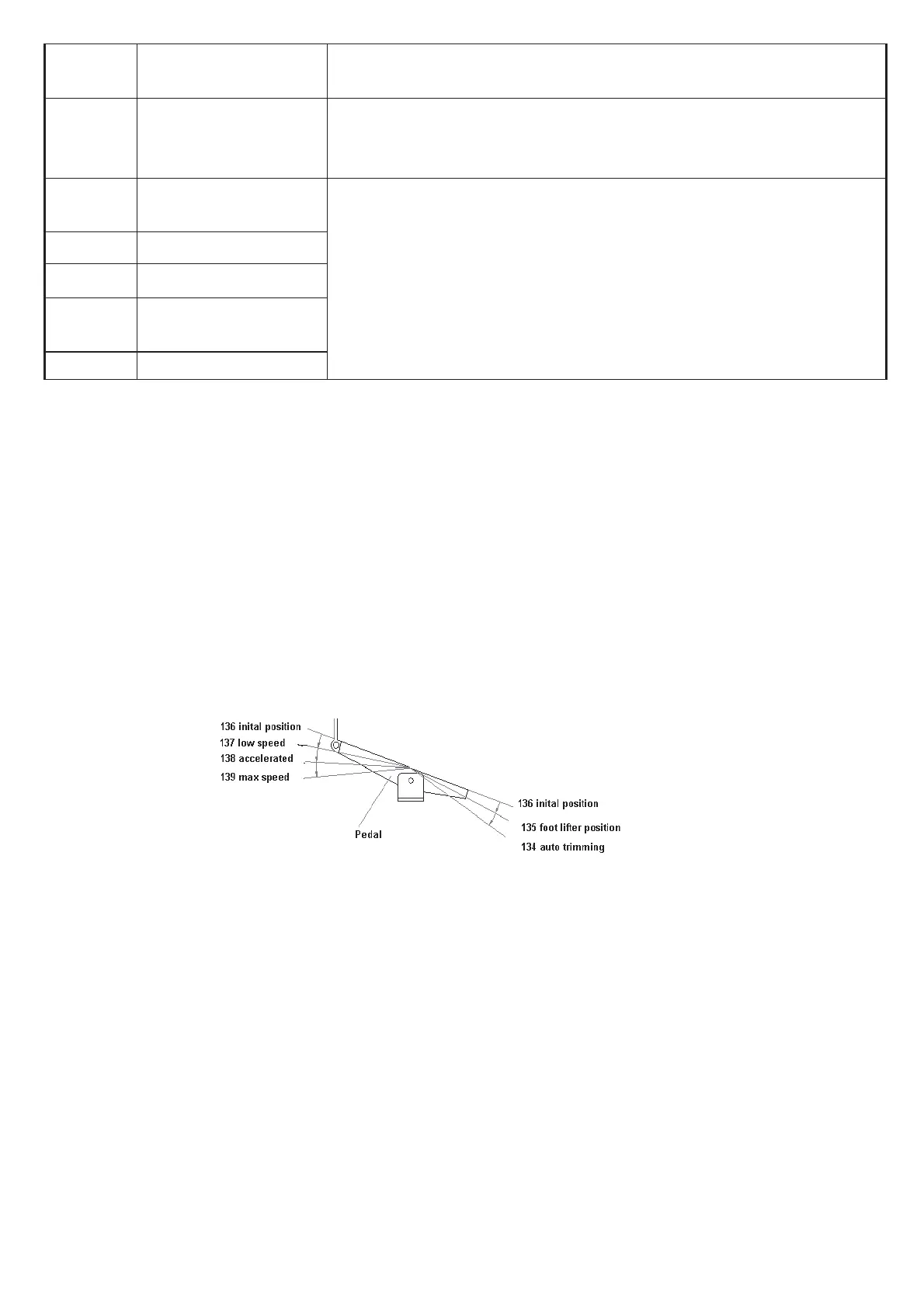
Pedal movement starts from the initial position (p.136) where the motor stops, slowly stepped forward to the
low speed point (p.137) where the motor runs at the minimum speed (p.100), proceeding to the accelerated point
(p.138) where the motor start fasten, until the max speed point (p.139) where the motor run up to the maximum
speed (p.101). And when the pedal steps back to the foot lifter position (p.135), the automatic presser foot lifting.
Continuing back to the auto trimming position (p.134), thread trimming is completed automatic. The parameter
value is set for an assurance (No. 134 parameters) < (No. 135 parameter) <( No. 136 parameters) <( No. 137
parameters) <( No. 138 parameters) <( No. 139 parameters). Adjusting the corresponding parameters, user can
acquire the proper pedal response to fit the personal habit.
Fig. 4-1 pedal movement of each position parameter
3)
 Loading...
Loading...











