25
TROUBLESHOOTING GUIDE / PRŮVODCE V NESNÁZÍCH / HILFE BEI SCHWIERIGKEITEN
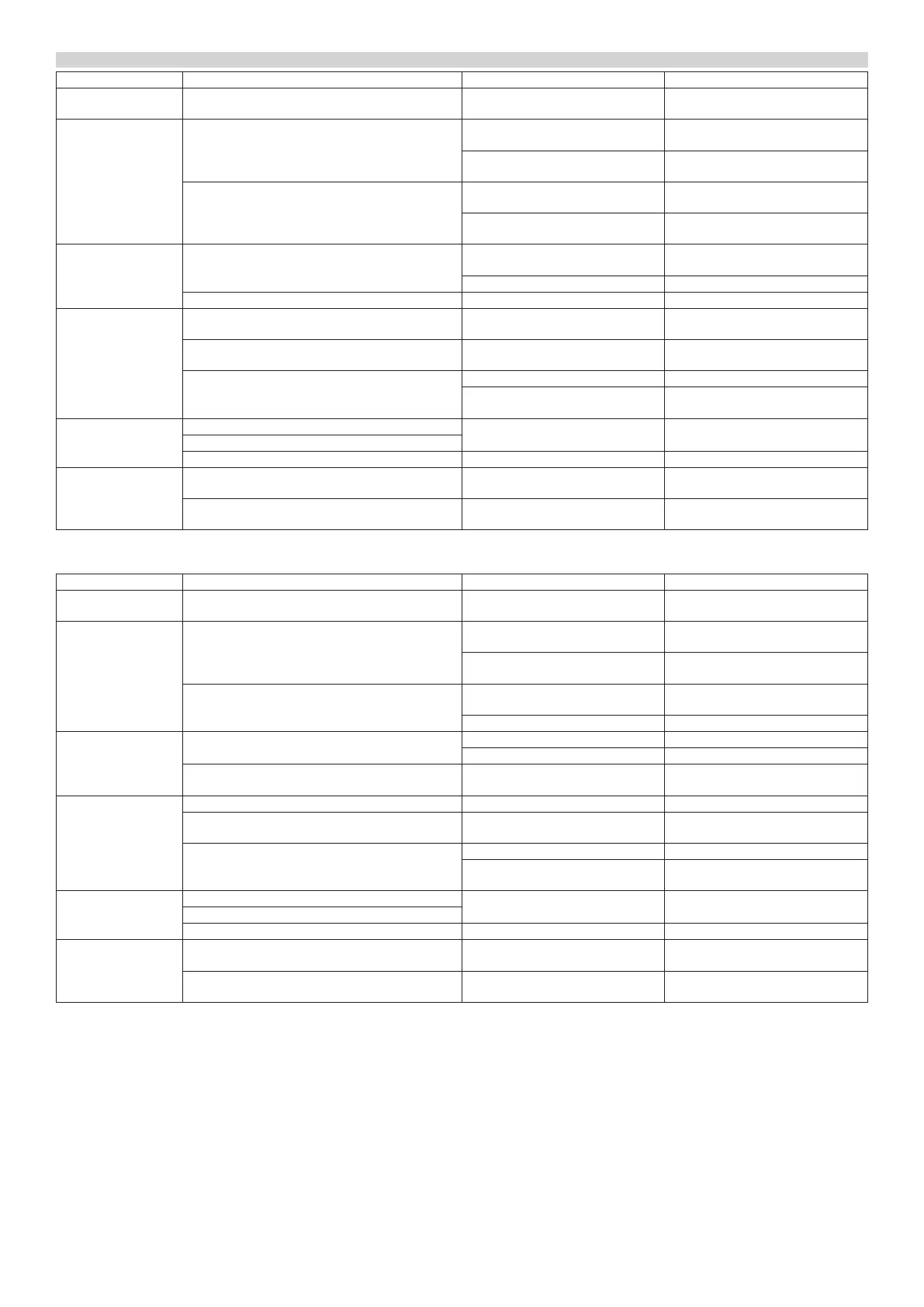
Problem Cause Solution
Blade tracking Blade tracking is o
Pitch linkage push rods are not even
length
Adjust length of pitch linkage push
rods
Hover
Headspeed too low
Excessive collective pitch
Adjust length of pitch linkage push
rods to reduce pitch
Hovering throttle curve is too low
Increase throttle curve at hovering
point on your transmitter
Headspeed too high
Not enough collective pitch
Adjust length of pitch linkage push
rods to increase pitch
Hovering throttle curve is too high
Decrease throttle curve at hovering
point on your transmitter
Yaw response
Drifting of tail occurs during hovering, or delay of
yaw response when centring the rudder stick
Yaw (rudder) neutral point improper-
ly set
Reset yaw (rudder) neutral point
Yaw gyro gain too low Increase yaw (rudder) gyro gain
Tail oscillates at hover or full throttle Yaw gyro gain too high Decrease yaw (rudder) gyro gain
Oscillation during
ight
Forward/aft oscillation when elevator (pitch) is
applied
Pitch (elevator) gyro gain too high Decrease pitch (elevator) gyro gain
Helicopter front bobbles (nods) during forward i-
ght
Worn servo or slack in control links
Replace servo, ball link or linkage
balls
Left/right oscillation when aileron (roll) is applied
Roll (aileron) gyro gain too high Decrease roll (aileron) gyro gain
Worn servo or slack in control links
Replace servo, ball link or linkage
balls
Drifting during ight
Elevator (pitch) input causes helicopter to drift
Pitch (elevator) gyro gain too low Increase pitch (elevator) gyro gain
Helicopter pitches up during forward ight
Aileron (roll) input causes helicopter to drift Roll (aileron) gyro gain too low Increase roll (aileron) gyro gain
Control response
Slow forward/aft/left/right input response Roll/pitch rate too low
Increase the roll/pitch rates on the i-
ght control unit
Sensitive forward/aft/left/right input response Roll/pitch rate too high
Decrease the roll/pitch rates on the
ight control unit
If above listed solution does not resolve your issues, please check with experienced pilots or contact your OMP HOBBY dealer.
Problém Příčina Řešení
Rovina otáčení
rotoru
Konce listů neobíhají ve stejné rovině
Táhla ovládání úhlu náběhu nemají
stejnou délku
Nastavte délku táhel ovládání náběhu
listů nosného rotoru
Visení
Otáčky rotoru jsou příliš nízké
Příliš velký kolektiv
Nastavte táhla pro snížení úhlu nábě-
hu listů při visení
Křivka plynu je příliš nízko
Zvyšte hodnotu křivky plynu pro vi-
sení
Otáčky rotoru jsou příliš vysoké
Příliš malý kolektiv
Nastavte táhla pro zvýšení úhlu nábě-
hu listů nosného rotoru při visení
Křivka plynu je příliš vysoko Snižte hodnotu křivky plynu pro visení
Odezva bočení
Při visení dochází k otáčení ocasu nebo odezva bočení
při návratu ovladače bočení do neutrálu je opožděná
Nesprávně nastavený neutrál bočení Znovu nastavte neutrál
Zisk gyra bočení je příliš nízký Zvyšte zisk gyra bočení
Při visení nebo plném plynu se ocas chvěje ze strany
na stranu
Zisk gyra bočení je příliš vysoký Snižte zisk gyra bočení
Chvění (oscilace)
během letu
Chvění vpřed/vzad při vychýlení ovladače klopení Zisk gyra klopení je příliš vysoký Snižte zisk gyra klopení
Při dopředném letu se příď vrtulníku kývá Opotřebené servo nebo vůle v táhlech
Vyměňte servo, koncovky nebo kulič-
ky kul. čepů
Chvění vlevo/vpravo při vychýlení ovladače klonění
Zisk gyra klonění je příliš vysoký Snižte zisk gyra klonění
Opotřebené servo nebo vůle v táhlech
Vyměňte servo, koncovky nebo kulič-
ky kul. čepů
Snos (drift) během
letu
Povel klopení vyvolává snášení vrtulníku
Zisk gyra klopení je příliš nízký Zvyšte zisk gyra klopení
Příď vrtulníku se v dopředném letu vzpíná
Povel klonění vyvolává snášení vrtulníku Zisk gyra klonění je příliš nízký Zvyšte zisk gyra klonění
Odezva řízení
Pomalá odezva na povely pro pohyb vpřed/vzad/vle-
vo/vpravo
Příliš malá velikost výchylek pro kloně-
ní a klopení
Zvětšete velikost výchylek klonění a
klopení na řídící jednotce
Příliš velká odezva na povely pro pohyb vpřed/vzad/
vlevo/vpravo
Příliš velká velikost výchylek pro kloně-
ní a klopení
Zmenšete velikost výchylek klonění a
klopení na řídící jednotce
Pokud výše uvedené pokyny nevedou k odstranění problému, poraďte se se zkušeným pilotem vrtulníků nebo kontaktujte distributora vrtulníků OMP HOBBY.
 Loading...
Loading...




