Application examples
Speed control
13−11
l
EDB82MV752 EN 5.2
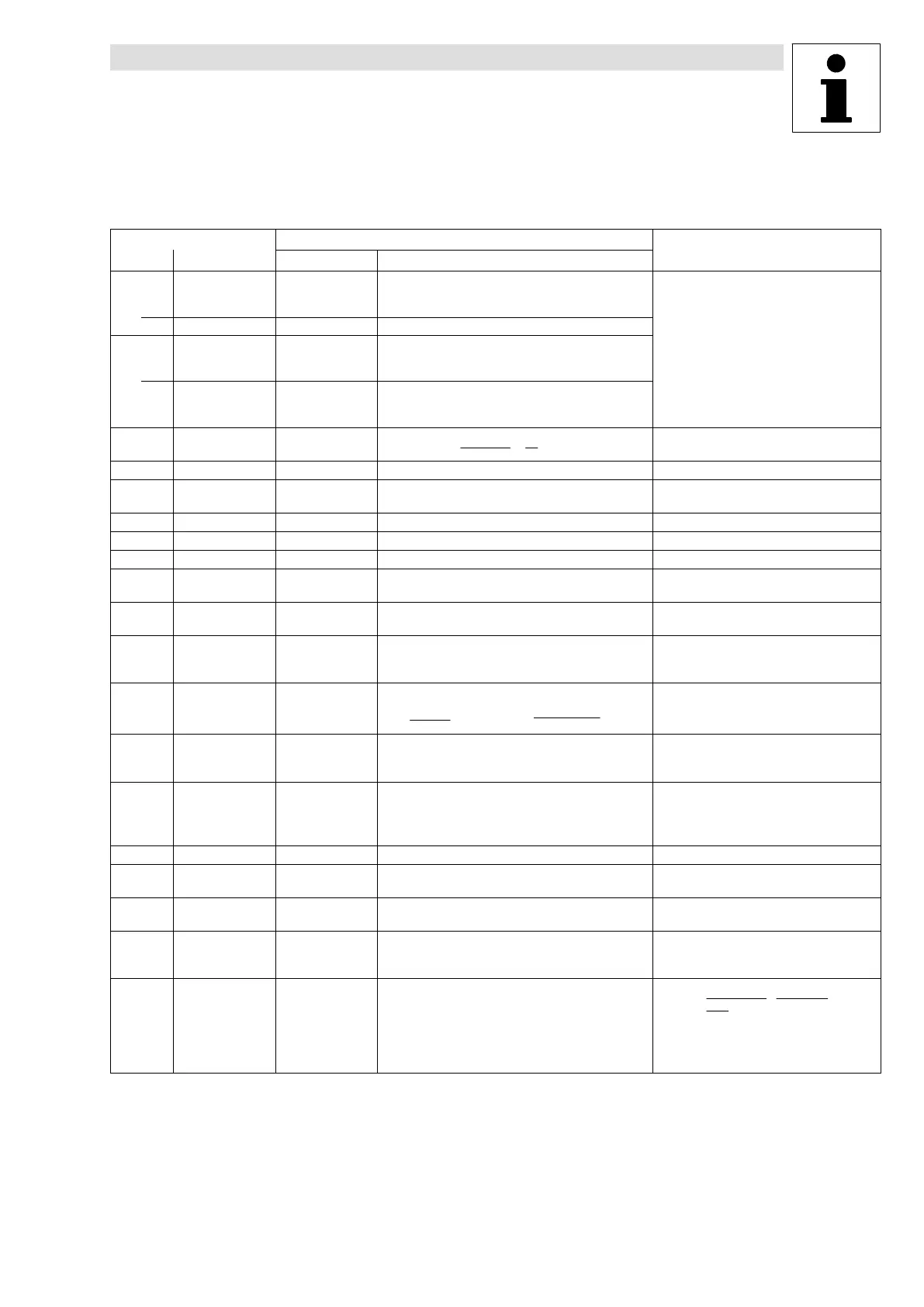
Application−specific configuration
Basic settings. ( 6−2)
Code
Settings Important
Value Meaning
C0410 Free configuration
of digital input
signals
Configuration of frequency input X3/E1
24 DFIN1−ON −1−
C0412 Free configuration
of analog input
signals
Analog signal source
5 Actual process
controller value
(PCTRL1−ACT)
−2−
C0011 Maximum output
frequency
(1
C0074[%]
100
)
p
60
n
max
p = number of pole pairs
n
max
= required maximum speed [rpm]
C0014↵ Operating mode −2 V/f characteristic control Dynamics in "vector control" mode too low
C0019 Operating threshold
auto DCB
approx. 0.5 Hz Adaptation to the application
C0021 Slip compensation 0 % No slip compensation with controlled operation
C0035*↵ DCB selection −1− Brake current selection under C0036
C0036 Voltage/current DCB 50 ... 100 % Adaptation to the application
C0070 Process controller
gain
1 ... 15 5 = typical
C0071 Process controller
reset time
50 ... 500 ms 100 ms = typical
C0072 Differential
component of
process controller
0 Not active
C0074 Process controller
influence
2 ... 10 %
S
N
n
0
n
N
n
0
Example
S
N
1500 1400
1500
6.67%
Adaptation to the application
Set 200% rated motor slip (2 * S
N
)
C0106 Hold time auto DCB 1 s Guide value
Afterwards the controller sets controller
inhibit
C0181* Process controller
setpoint 2
(PCTRL1−SET2)
Adaptation to the application
Selection with keypad or PC
7−53: Further options for selecting the
setpoint
C0196*↵ Activation auto DCB −1− DCB active when C0050 < C0019 and setpoint < C0019
C0238↵ Frequency
precontrol
−1− With frequency feedforward control
C0239↵ Lower frequency
limitation
0 Hz unipolar, no reversal of rotation direction
C0425↵* Configuration of
frequency input
X3/E1 (DFIN1)
Set C0425 so that, at maximum motor speed,
the frequency supplied by the encoder is lower
than f
max
C0426* Frequency input
gain X3/E1, X3/E2
(A) (DFIN1−GAIN)
100 −1500.0 {0.1 %} 1500.0
C0426
f
N
(C0425)
n
max
60s
increv
C0011 f
s
C0011
100%
n
max
= maximum motor process speed in
rpm
f
s
= slip frequency in Hz
 Loading...
Loading...