9 COMMUNICATION FUNCTION (MITSUBISHI ELECTRIC AC SERVO PROTOCOL) [A]
9.4 Command and data No. list
517
9
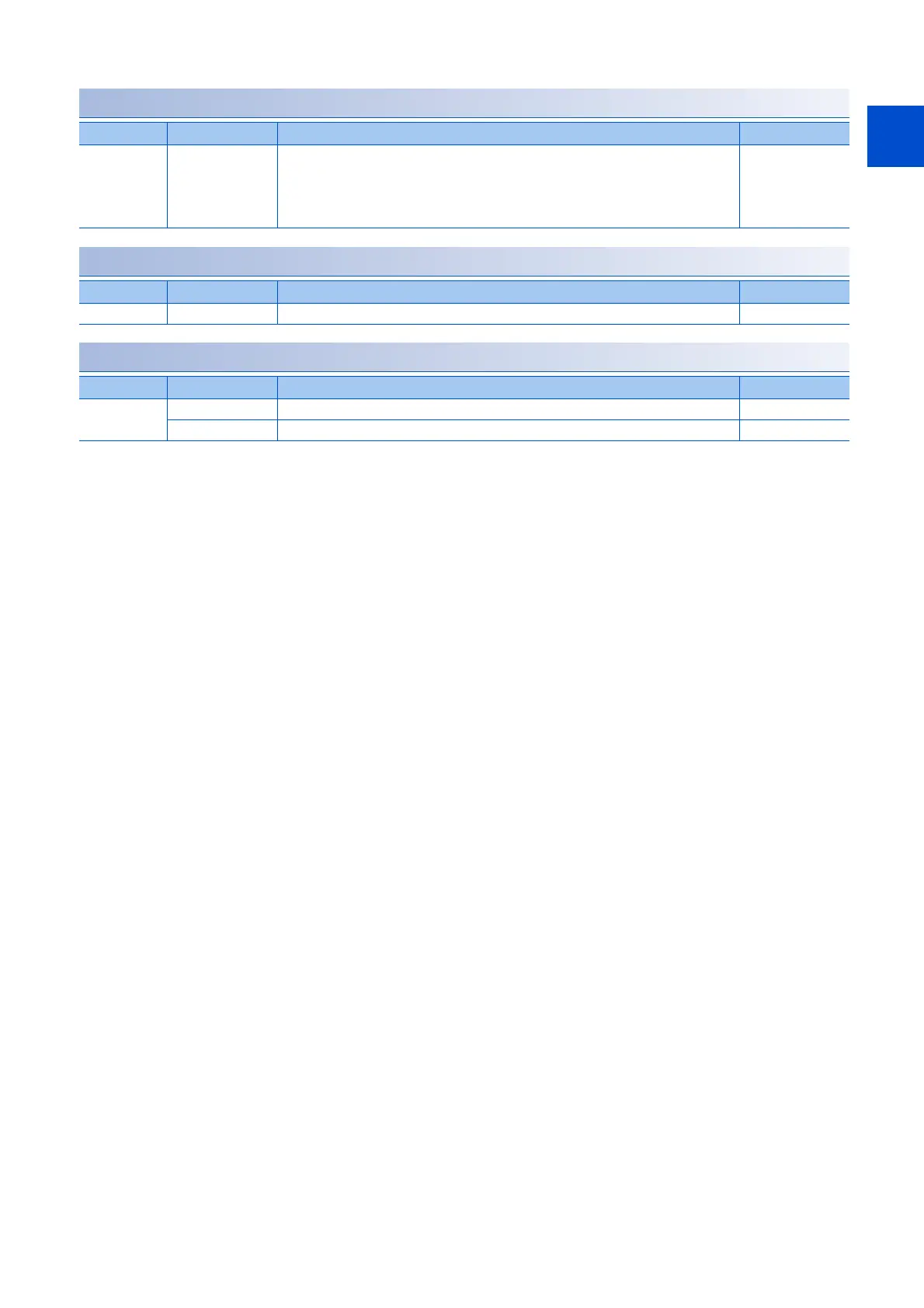
Test operation mode (command [0] [0])
Firmware version (command [0] [2])
Absolute position (command [0] [2])
Command Data No. Description Frame length
[0] [0] [1] [2] Reading the test operation mode
0000: Normal mode (not test operation mode)
0001: JOG operation
0002: Positioning operation
0004: Output signal (DO) forced output
4
Command Data No. Description Frame length
[0] [2] [7] [0] Firmware version 16
Command Data No. Description Frame length
[0] [2] [9] [0] Absolute position in units of servo motor-side pulses 8
[9] [1] Absolute position in the command unit 8

 Loading...
Loading...









