7.3.5) ROBUS в режиме «Ведомый»
При программировании и подключении ROBUS может функ-
ционировать в режиме «Ведомый»; данная функция применя-
ется для синхронизации двух створок, движущихся в противо-
положном направлении, для синхронизации их движения. В
этом режиме ROBUS работает как «Ведущий», т.е. управляет
операциями, в то время как второй ROBUS работает как
«Ведомый», т.е. выполняет команды «Ведущего» (заводская
установка предполагает, что все ROBUS работают как «Веду-
щие»).
Для конфигурации ROBUS в качестве «Ведомого» необходимо
включить функцию первого уровня «Ведомый режим» (см.
таблицу 7).
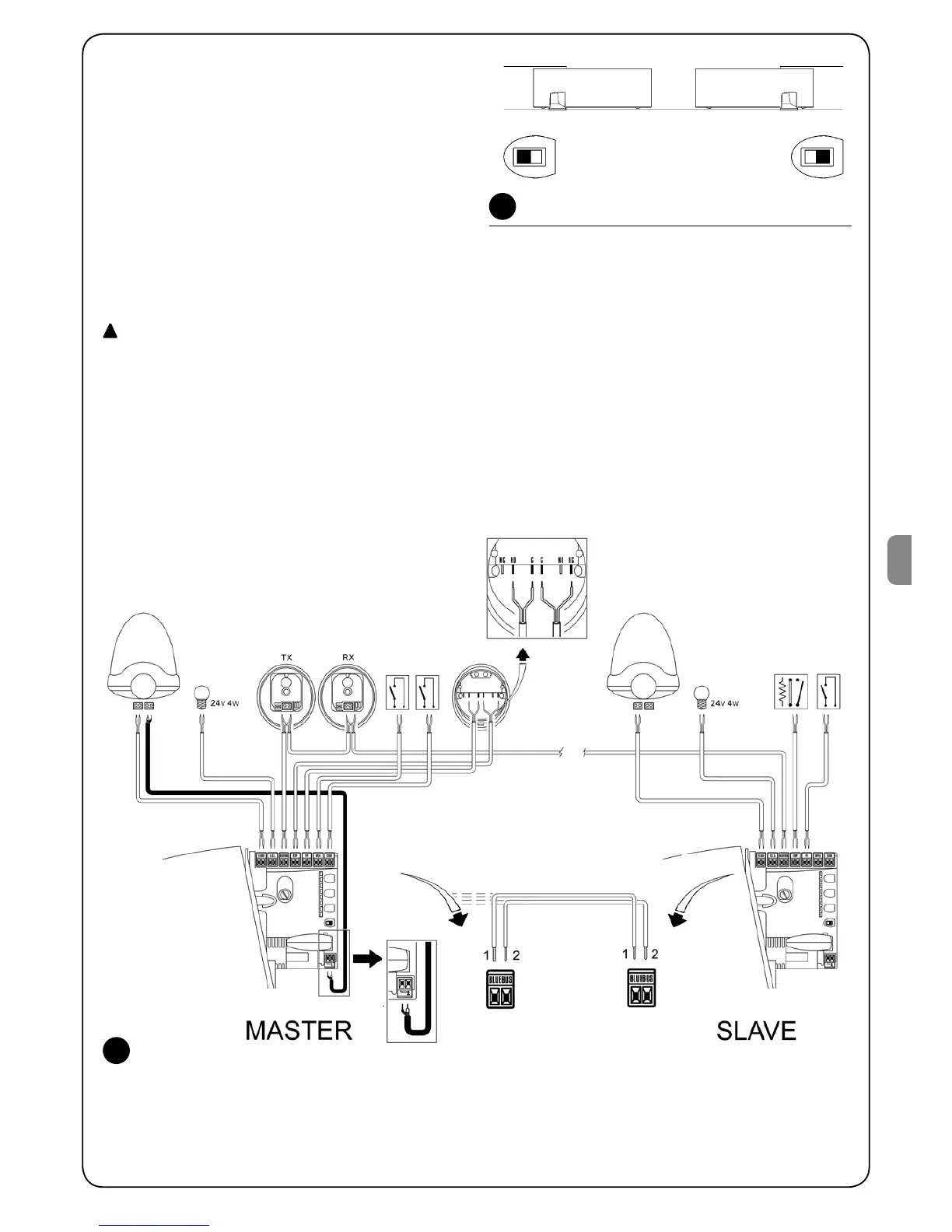
Соединение между ROBUS «Ведущий» и ROBUS «Ведомый»
осуществляется по шине BLUEBUS.
В этом случае полярность соединения двух ROBUS
должна соответствовать как показано на рисунке 26
(другие устройства остаются неполярными).
Для установки 2 ROBUS в режим «Ведущий» и «Ведомый»
необходимо выполнить следующие операции:
• Произвести монтаж 2 двигателей, как показано на рисунке
25. Не важно, который из двух двигателей работает как
«Ведущий» и который «Ведомый»; при выборе необходимо
произвести оценку удобства соединения и того факта, что
Пошаговое управление обеспечивает полное открывание
только створки в режиме «Ведомый».
• Подключить 2 двигателя, как показано на рисунке 26.
• Выбрать направление операции на открывание 2 двигателей,
как показано на рисунке 25 (см.также параграф «4.1 Выбор
направления»).
• Подать питание на 2 двигателя.
• В ROBUS «Ведомый» запрограммировать функцию «Режим
ведомый (см.таблицу 5).
• Произвести распознавание устройств на ROBUS Ведомый
(см.параграф «4.3 Распознавание других устройств»).
• Произвести распознавание устройств на ROBUS Ведущий
(см.параграф «4.3 Распознавание других устройств»).
• Произвести распознавание длины створки на ROBUS
Ведущий (см.параграф «4.4 Распознавание длины
створки»).
25
26
При соединении 2 ROBUS в режиме «Ведущий-Ведомый» обратить внимание на:
• Все устройства должны подключаться к ROBUS «Ведущий» (как показано на рис. 26), включая радиоприемник
• В случае использования резервной батареи, оба двигателя должны быть работать от отдельной батареи.
• Все запрограммированные настройки на ROBUS «Ведомый» игнорируются (доминируют настройки ROBUS «Ведущий»), за
исключением указанных в таблице 12.
LUCYB
S.C.A.
MOFB
MOSE
LUCYB
S.C.A.
PP
ОТКРЫТО
ЗАКРЫТО
СТОП
 Loading...
Loading...