7 Applied Functions
7 - 30
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
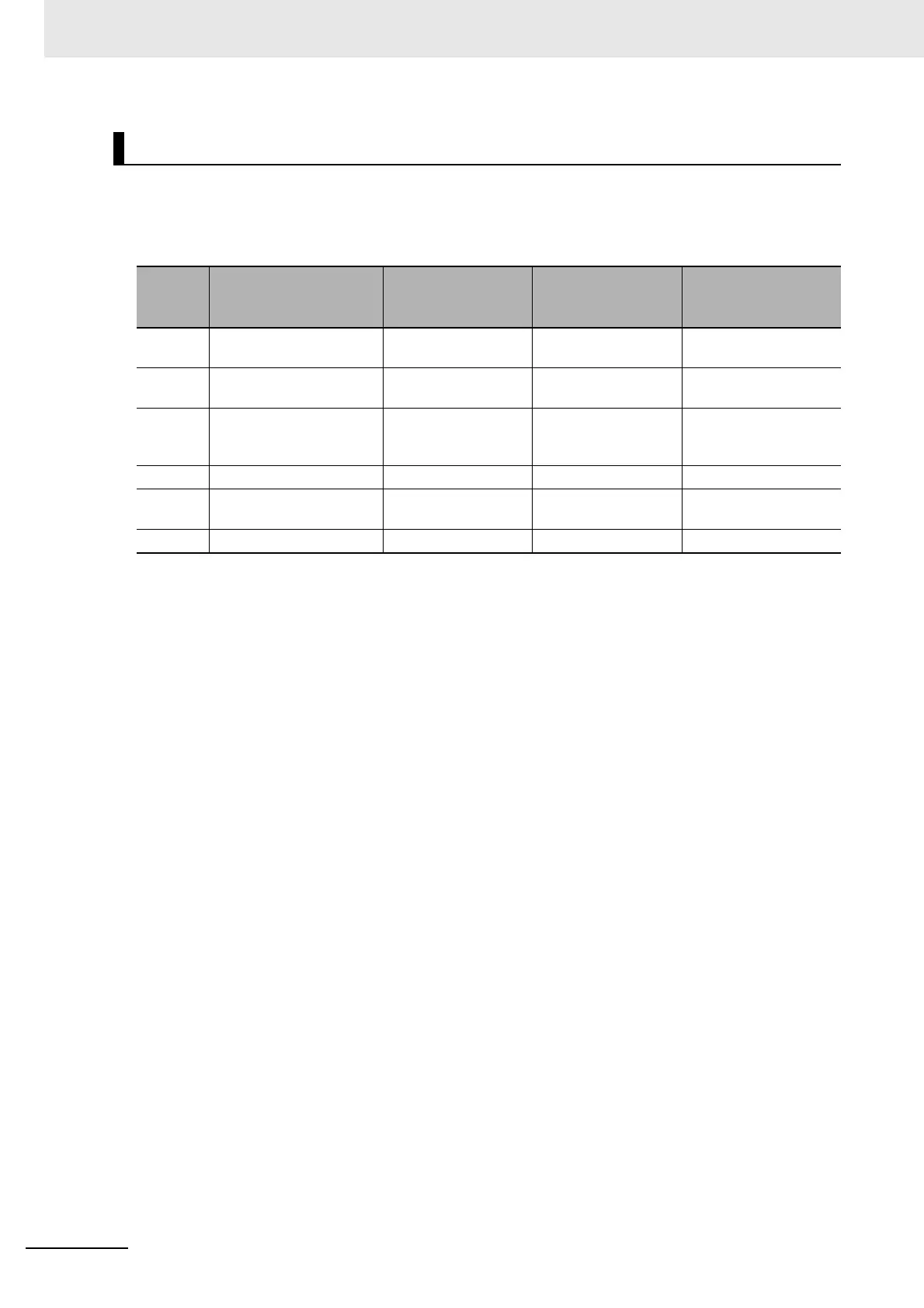
In the Speed Control Mode, it varies as follows according to Switching Mode in Speed Control
(3120 hex).
For operation details, refer to 7-9-3 Diagrams of Gain Switching Setting on page 7-31.
(3: Enabled/–: Disabled)
*1 The Gain Switching Delay Time in Speed Control (3121 hex) becomes effective when the gain is switched from
2 to 1.
*2 Set the Level (3122 hex) to greater than or equal to the Hysteresis (3123 hex).
*3 If set to greater than the level set in Gain Switching Level in Speed Control (3122 hex), the hysteresis set in
Gain Switching Hysteresis in Speed Control (3123 hex) will be automatically adjusted to equal to the level set
in Gain Switching Level in Speed Control (3122 hex).
z Gain switching command input via EtherCAT communications
The gain is switched instantly when a gain switching command is issued via EtherCAT
communications.
z Force command
The gain is switched via a force command.
z Speed command variation
The gain is switched via the speed command variation.
z Speed command
The gain is switched via a speed command.
Speed Control Mode
3120 hex
set value
Gain switching
conditions
Gain Switching
Delay Time in Speed
Control (3121 hex)
*1
Gain Switching
Level in Speed
Control (3122 hex)
*2
Gain Switching
Hysteresis in Speed
Control (3123 hex)
*3
0 Always Gain 1 (3100 to
3104 hex).
–– –
1 Always Gain 2 (3105 to
3109 hex).
–– –
2 Gain switching command
input via EtherCAT
communications
–– –
3 Force Command 33 [%] 3 [%]
4 Speed Command
Variation
33 [[10 mm/s]/s] 3 [[10 mm/s]/s]
5 Speed Command 33 [mm/s] 3 [mm/s]
 Loading...
Loading...
