9 Servo Parameter Objects
9 - 42
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
• Set the drive conditions during deceleration and after stopping, when the Positive or Negative Drive
Prohibition Input is enabled.
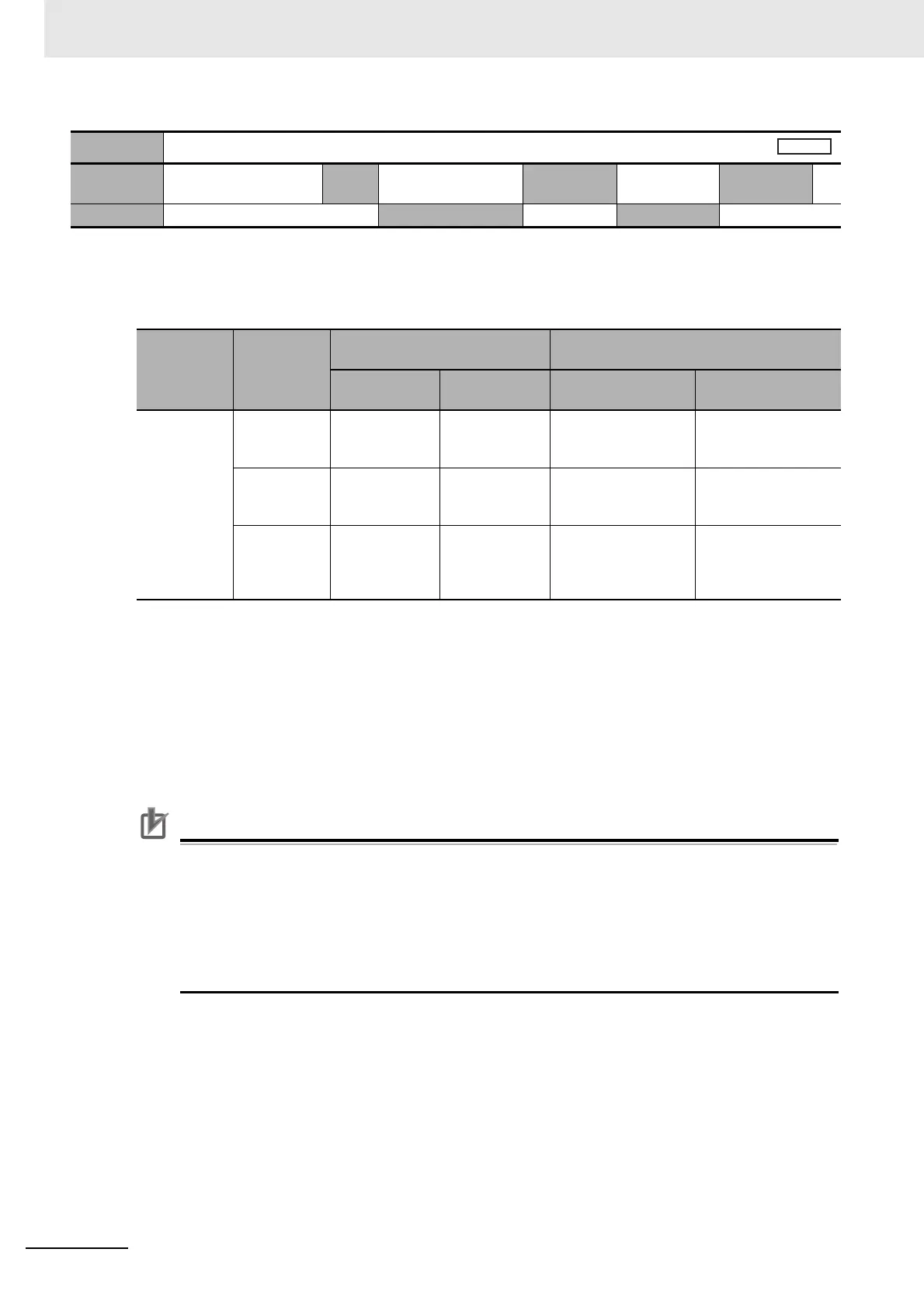
Explanation of Settings
*1 If the Drive Prohibition Input Selection (3504 hex) is set to 2, a Drive Prohibition Input Error (Error No. 38.0) will
occur as soon as either the Positive or Negative Drive Prohibition Input becomes open. Therefore, regardless
of the set value, the subsequent operation will be performed according to the setting of the Fault reaction
option code (605E hex). In the same way, the Fault reaction option code (605E hex) takes priority when any
other error occurs.
*2 The term “During deceleration” shows the distance until the motor decreases its speed to 30 mm/s or less from
the normal operation. Once it decelerates to 30 mm/s or lower speed, the operation conforms to the
description for “after stopping,” regardless of the actual speed.
*3 “Immediate Stop” means that the Linear Motor stops immediately by using controls while the servo is kept ON.
The force command value at this time is controlled by the Immediate Stop Force (3511 hex) set value.
Precautions for Correct UsePrecautions for Correct Use
• An immediate stop forces the motor to decelerate quickly, which momentarily causes a large
position error in position control. This may result in an Error Counter Overflow (Error No. 24.0)
or an Overrun Limit Error (Error No. 34.0). If an error occurs, set the Following error window
(6065 hex) and the Overrun Limit Setting (3514 hex) to appropriate values.
• A Command Warning (Warning No. B1 hex) will occur if a command is given in the drive
prohibition direction while the motor is stopped (or decreased the speed to 30 mm/s or lower)
and the Drive Prohibition Input is ON.
For details, refer to 7-2 Positive and Negative Drive Prohibition Functions on page 7-8.
3505 hex
Stop Selection for Drive Prohibition Input
Setting
range
0 to 2
Unit
–
Default
setting
0 Data
attribute
C
Size 2 bytes (INT16) Access RW PDO map Not possible
3504 hex set
value
*1
3505 hex set
value
Decelerating
*2
After stopping
(Approx. 30 mm/s or less)
Deceleration
method
Error counter
Operation after
stopping
Error counter
0 0 Dynamic brake Clear Force command is 0
for drive prohibition
direction
Hold
1 Free-run Clear Force command is 0
for drive prohibition
direction
Hold
2Immediate
stop
*3
Clear Force command and
force limit are as
specified.
Cleared after
deceleration
completes, then
Hold.
 Loading...
Loading...
