11 - 3
11 Adjustment Functions
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
11-1 Analog Monitor
11
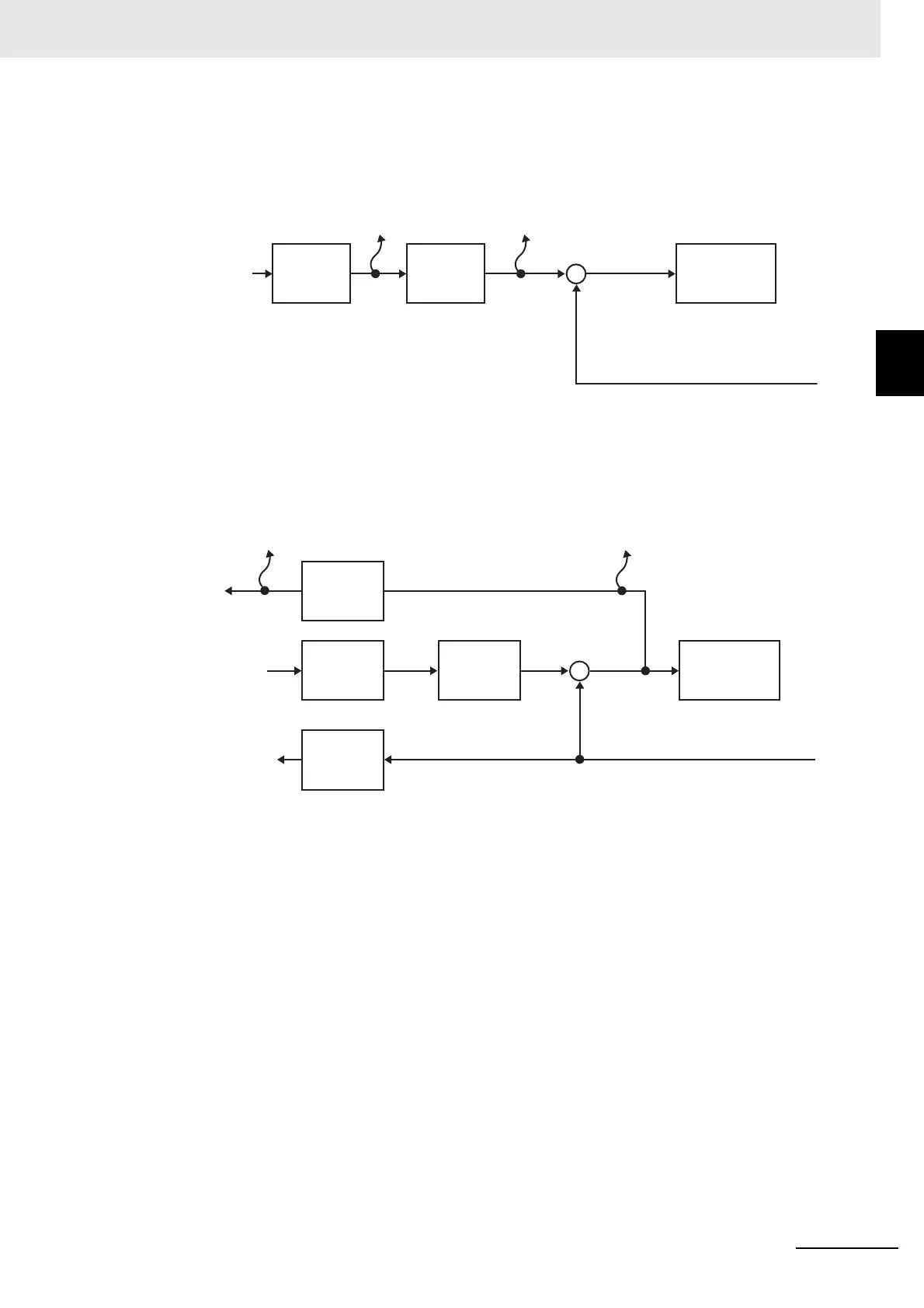
*1. The Motor Velocity Demand Value is the speed before the command input passes through the command filter
(smoothing filter or FIR filter). The Motor Velocity Demand Value After Filtering is the speed after the
command input passes through the command filter.
*2. Read the word “torque” as “force.”
*3. The Following error actual value is calculated for the command input after processing for the position
command filter. The Following Error Actual Internal Value is reversely converted to command units for
application.
The Following Error Actual Internal Value is the error for the position control input.
+
-
Command
input
Electronic
gear
Internal Command
Motor Speed [mm/s]
Filtered Internal Command
Motor Speed [mm/s]
Position
command
filter
Position
control
External encoder data
+
-
Command
input
Electronic
gear
Following Error Actual Internal Value
[external encoder units]
Position
command
filter
Position
control
Following Error Actual Value [command unit]
Electronic
gear reverse
conversion
External encoder data
Current motor
position
[command unit]
Electronic
gear reverse
conversion
 Loading...
Loading...
