12 Troubleshooting and Maintenance
12 - 10
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
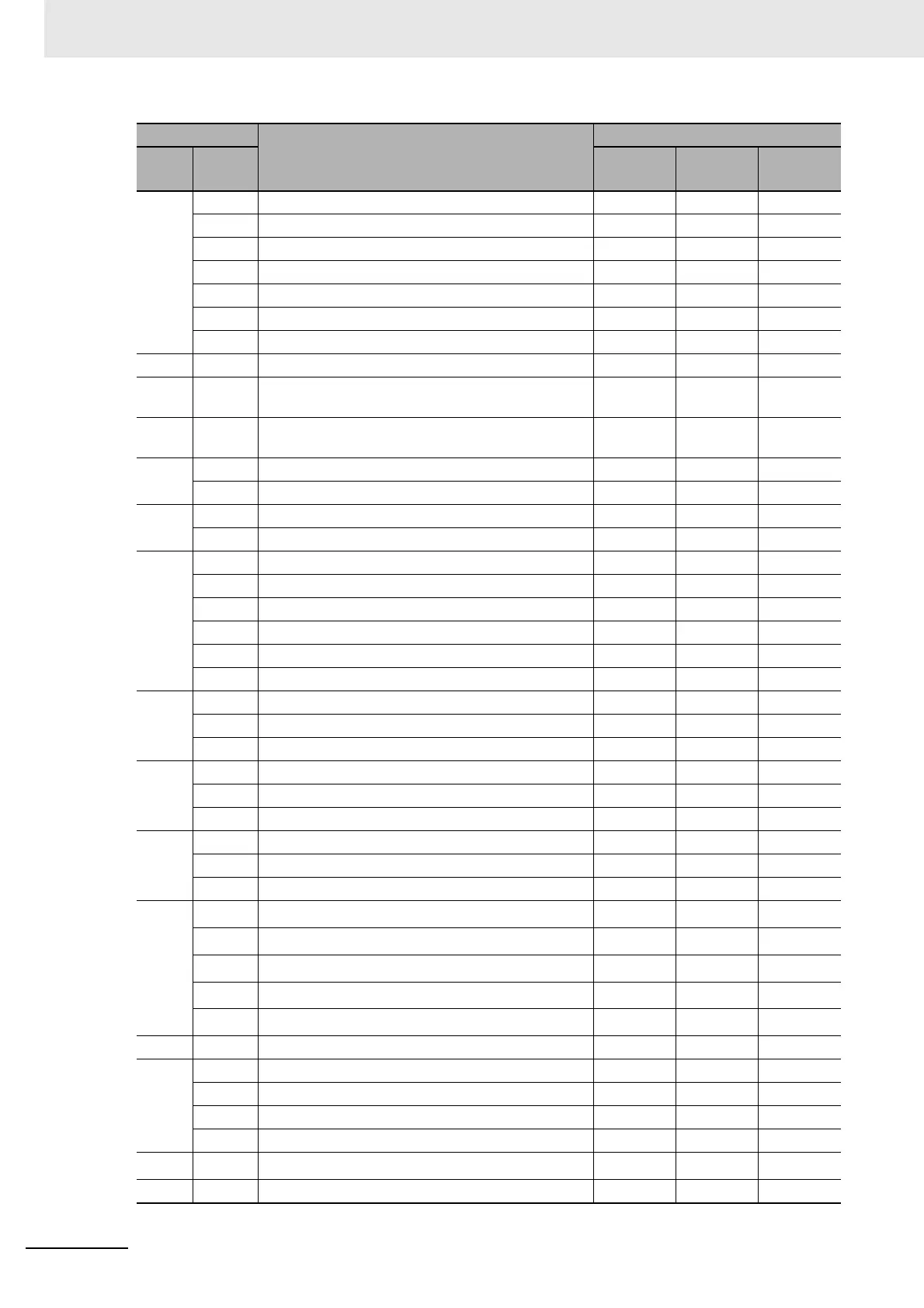
33 hex 0 hex Interface Input Duplicate Allocation Error 1 3 –B
1 hex Interface Input Duplicate Allocation Error 2 3 –B
2 hex Interface Input Function Number Error 1 3 –B
3 hex Interface Input Function Number Error 2 3 –B
4 hex Interface Output Function Number Error 1 3 –B
5 hex Interface Output Function Number Error 2 3 –B
8 hex External Latch Input Allocation Error 3 –B
34 hex 0 hex Overrun Limit Error 33B
36 hex 0 hex to
2hex
Object Error – –
B
37 hex 0 hex to
2hex
Object Corrupted – –
B
38 hex 0 hex Drive Prohibition Input Error 1 – 3 B
1 hex Drive Prohibition Input Error 2 – 3 B
50 hex 0 hex External Encoder Connection Error 3 –B
1 hex External Encoder Communications Data Error 3 –B
51 hex 0 hex External Encoder Status Error 0 3 –B
1 hex External Encoder Status Error 1 3 –B
2 hex External Encoder Status Error 2 3 –B
3 hex External Encoder Status Error 3 3 –B
4 hex External Encoder Status Error 4 3 –B
5 hex External Encoder Status Error 5 3 –B
55 hex 0 hex Phase-A Connection Error 3 –B
1 hex Phase-B Connection Error 3 –B
2 hex Phase-Z Connection Error 3 –B
60 hex 0 hex Motor Setting Error – – B
1 hex Motor Combination Error 1 – – B
2 hex Motor Combination Error 2 – – B
61 hex 0 hex Magnetic Pole Position Estimation Error 1 33B
1 hex Magnetic Pole Position Estimation Error 2 33B
2 hex Magnetic Pole Position Estimation Error 3 – – B
83 hex 1 hex EtherCAT State Change Error 3
3
*3
B
2 hex EtherCAT Illegal State Change Error 3
3
*3
B
3 hex Communications Synchronization Error 3
3
*3
B
4 hex Synchronization Error 3
3
*3
B
5 hex Sync Manager WDT Error 3
3
*3
B
87 hex 0 hex Immediate Stop Input Error – 3 B
88 hex 0 hex Node Address Setting Error 3 –B
1 hex ESC Initialization Error 3 –B
2 hex Interruptions Error 3 –B
3 hex SII Verification Error 3 –B
90 hex 0 hex External Communications Setting Error 3
3
*3
B
91 hex 1 hex Command Error 33B
Error No.
Error detection function
Attribute
Main Sub History
Can be
reset
Deceleration
method
*1
 Loading...
Loading...
