Appendices
A - 60
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
• This object sets the operation of the G5-series Servo Drive during deceleration and after stopped,
following the Servo OFF (Disable operation) state.
Explanation of Settings
*1 “Decelerating” means that after the start of deceleration, the time during which the motor runs at 30 mm/s or
higher.
Once the motor speed reaches 30 mm/s or lower and the status changes to “After stopping”, subsequently the
operation after stopping is performed regardless of the motor speed.
*2 “Immediate Stop” means that the Linear Motor stops immediately by using controls while the servo is kept ON.
The force command value at this time is controlled by the Immediate Stop Force (3511 hex) set value.
*3 When the error is cleared, a process which makes the Position demand value follow the Position actual value
comes into effect. To operate in cyclic sync mode (csp) after the servo turns ON, reset the command
coordinates in the host controller and then execute the operation. The motor may move suddenly.
Precautions for Correct UsePrecautions for Correct Use
• Position control is forced into operation during deceleration and after the motor has stopped
(during servo OFF). The internal position command generation process is also forced to stop.
• If an error occurs while the servo is OFF, operation will follow the Fault reaction option code
(605E hex).
• If the main power supply turns OFF while the servo is OFF, the Shutdown option code
(605B hex) will be followed.
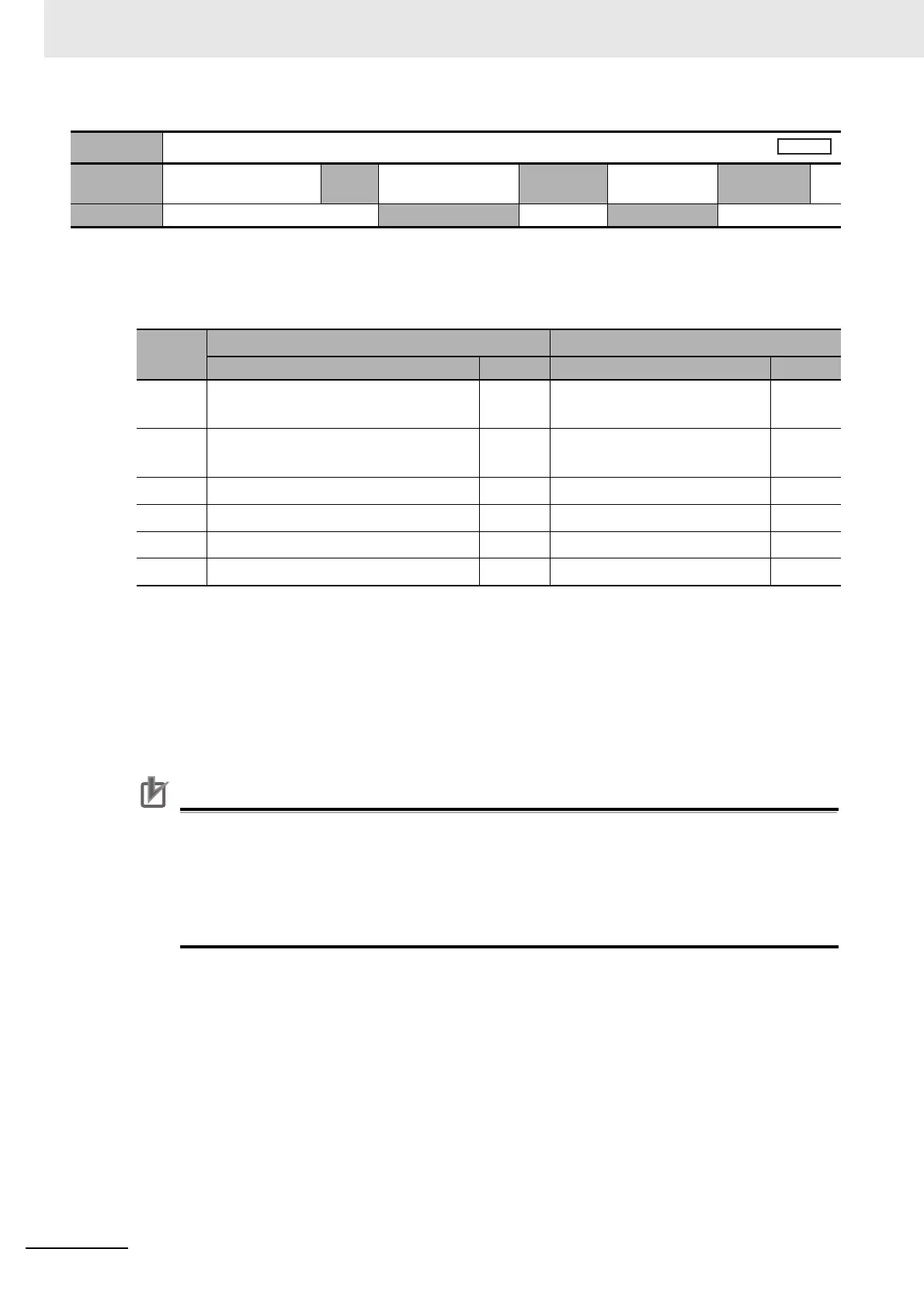
605C hex
Disable operation option code
Setting
range
–5 to 0
Unit
–
Default
setting
–1 Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible
Set
value
Decelerating
*1
After stopping
Deceleration method Error Operation after stopping Error
–5
Immediate Stop
*2
Immediate Stop Force = 3511 hex
Clear
*3
Free
Clear
*3
–4
Immediate Stop
*2
Immediate Stop Force = 3511 hex
Clear
*3
Dynamic brake operation
Clear
*3
–3 Dynamic brake operation
Clear
*3
Free
Clear
*3
–2 Free-run
Clear
*3
Dynamic brake operation
Clear
*3
–1 Dynamic brake operation
Clear
*3
Dynamic brake operation
Clear
*3
0 Free-run
Clear
*3
Free
Clear
*3
 Loading...
Loading...
