A - 91
Appendices
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
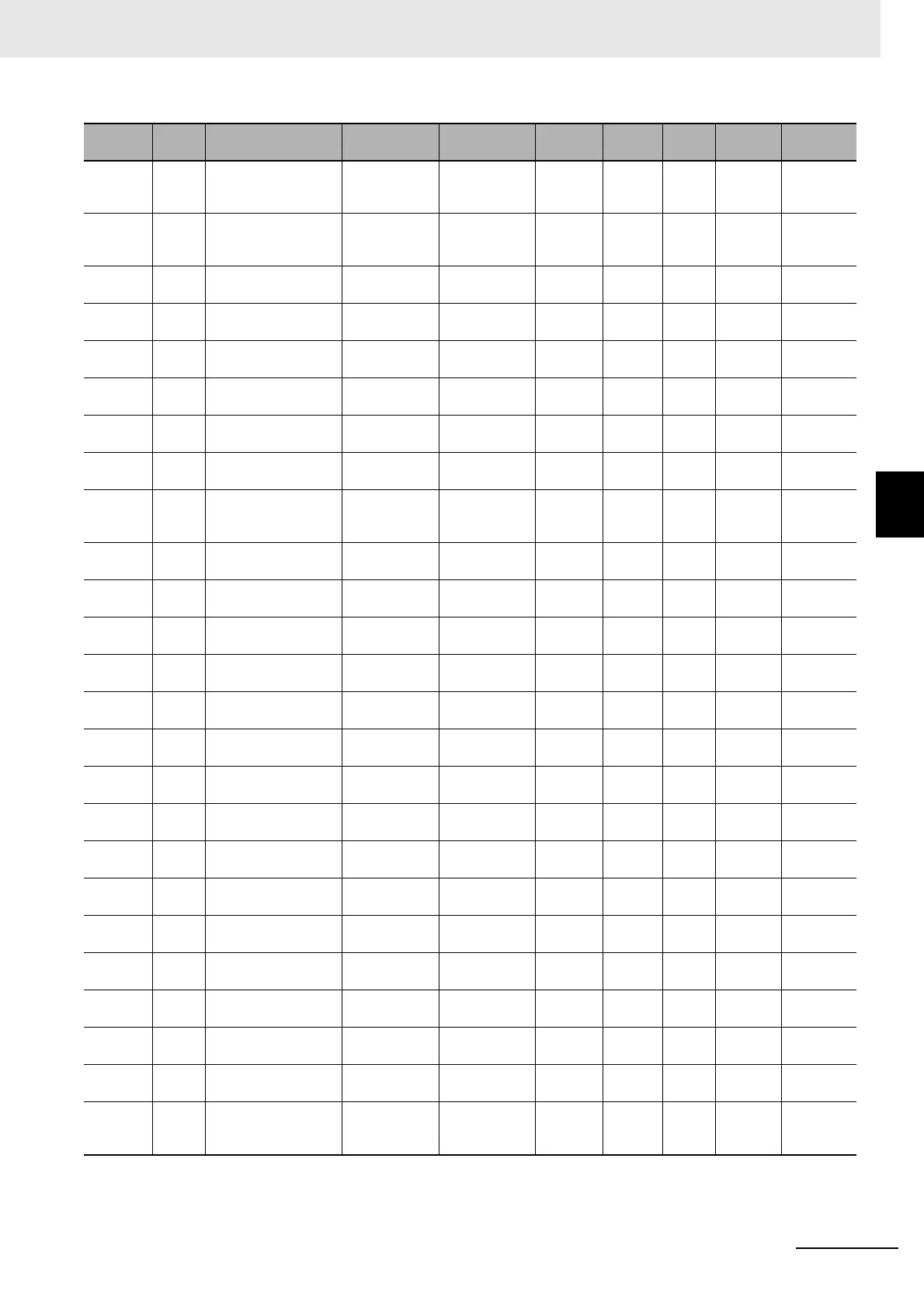
A-2 Object List
A
*1 For details, refer to 3912 hex on page 9-64.
3705 hex 00 hex Backlash
Compensation
Amount
0 –32,768 to
32,767
Command
unit
2 bytes
(INT16)
BNot
possible
Pn705
3706 hex 00 hex Backlash
Compensation Time
Constant
0 0 to 6,400 0.01 ms 2 bytes
(INT16)
BNot
possible
Pn706
3758 hex 00 hex Touch Probe Trigger
Selection
0100 hex 0000 to
FFFF hex
– 2 bytes
(U16)
BNot
possible
Pn758
3759 hex 00 hex Warning Hold
Selection
0000 hex 0000 to
FFFF hex
– 2 bytes
(U16)
RNot
possible
Pn759
3781 hex 00 hex Data Setting Warning
Detection Setting
1 0 to 15 Times 2 bytes
(INT16)
CNot
possible
Pn781
3800 hex 00 hex Communications
Control
16,384 –32,768 to
32,767
– 2 bytes
(INT16)
CNot
possible
Pn800
3801 hex 00 hex Software Position
Limit Function
3 0 to 3 – 2 bytes
(INT16)
ANot
possible
Pn801
3803 hex 00 hex Origin Range 10 0 to 250
Command
unit
2 bytes
(INT16)
ANot
possible
Pn803
3818 hex 00 hex Position Command
FIR Filter Time
Constant
0 0 to 10,000 0.1 ms 2 bytes
(INT16)
BNot
possible
Pn818
3901 hex 00 hex External Encoder
Resolution
0 0 to
16,777,216
0.001
µm
4 bytes
(INT32)
RNot
possible
Pn901
3902 hex 00 hex Pole Pitch 0 0 to 32,767 0.01 mm 2 bytes
(INT16)
RNot
possible
Pn902
3904 hex 00 hex Motor Coil Unit Mass 0 0 to 32,767 0.01 kg 2 bytes
(INT16)
RNot
possible
Pn904
3905 hex 00 hex Motor Rated Force 0 0 to 32,767 0.1 N 2 bytes
(INT16)
RNot
possible
Pn905
3906 hex 00 hex Motor Rated Rms
Current
0 0 to 32,767 0.1 Arms 2 bytes
(INT16)
RNot
possible
Pn906
3907 hex 00 hex Motor Peak Absolute
Current
0 0 to 32,767 0.1A 2 bytes
(INT16)
RNot
possible
Pn907
3908 hex 00 hex Motor Inductance 0 0 to 32,767 0.01 mH 2 bytes
(INT16)
RNot
possible
Pn908
3909 hex 00 hex Motor Resistance 0 0 to 32,767 0.01 Ω 2 bytes
(INT16)
RNot
possible
Pn909
3910 hex 00 hex Overspeed Level 0 0 to 20,000 mm/s 2 bytes
(INT16)
RNot
possible
Pn910
3912 hex 00 hex Current Response
Auto-adjustment
*1
0 to 100 % 2 bytes
(INT16)
RNot
possible
Pn912
3913 hex 00 hex Current Loop
Proportional Gain
50 0 to 32,767 – 2 bytes
(INT16)
BNot
possible
Pn913
3914 hex 00 hex Current Loop Integral
Gain
10 0 to 32,767 – 2 bytes
(INT16)
BNot
possible
Pn914
3915 hex 00 hex Two-stage Force Filter
Time Constant
0 0 to 2,500 0.01 ms 2 bytes
(INT16)
BNot
possible
Pn915
3916 hex 00 hex Two-stage Force Filter
Attenuation Term
1,000 0 to 1,000 – 2 bytes
(INT16)
BNot
possible
Pn916
3920 hex 00 hex Magnetic Pole
Detection Method
0 0 to 3 – 2 bytes
(INT16)
RNot
possible
Pn920
3922 hex 00 hex Magnetic Pole
Position Estimation
Force Command Time
200 0 to 200 ms 2 bytes
(INT16)
BNot
possible
Pn922
Index
Sub-
Index
Name
Default
setting
Setting range Unit Size
Data
attribute
PDO
map
Corresponding
Pn number
 Loading...
Loading...
