A - 23
Appendices
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
A-1 CiA402 Drive Profile
A
A-1-7 Object Dictionary
In this manual, objects are described in the following format.
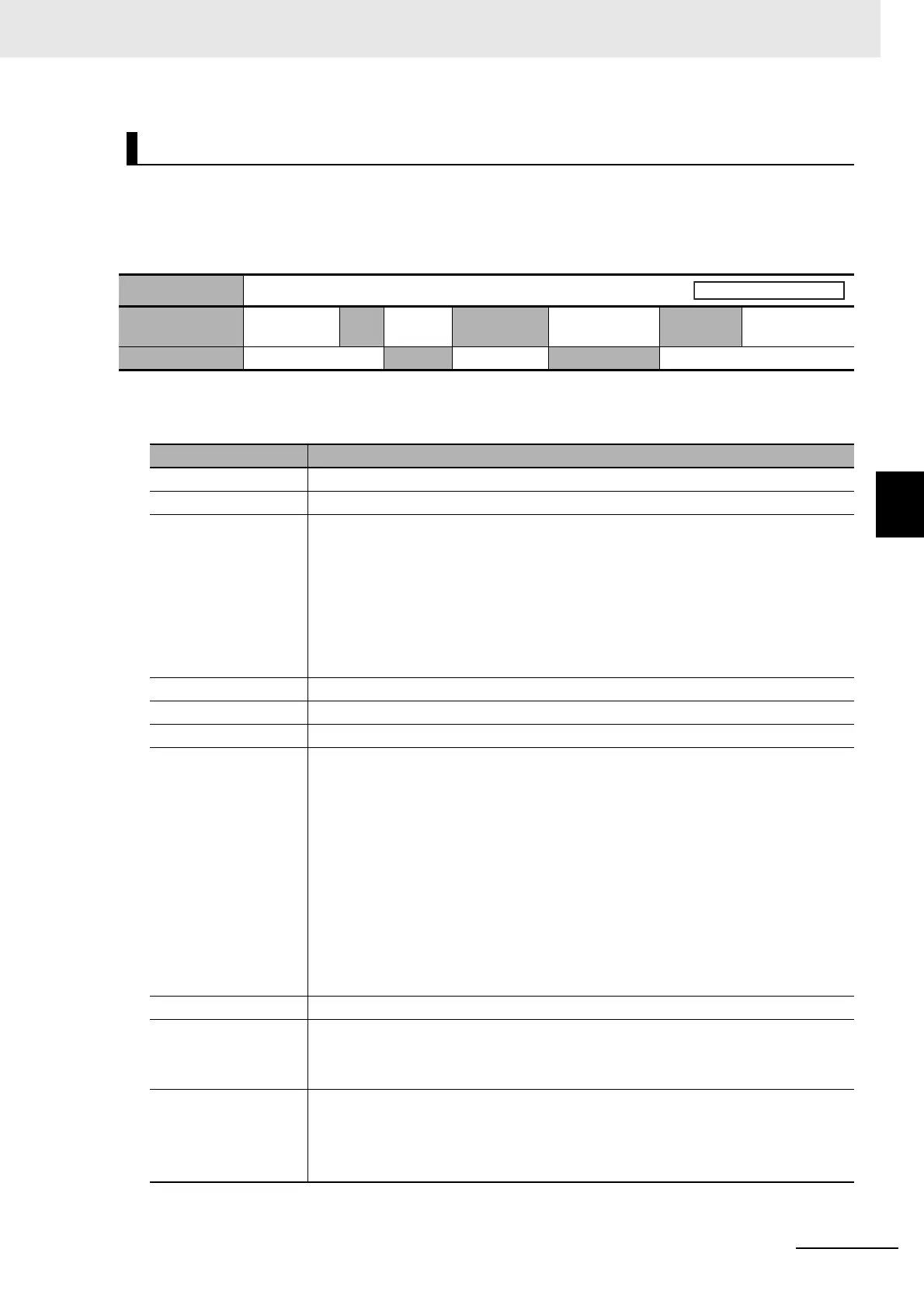
z Object Description Format
The object format is shown below.
Data is indicated in pointed brackets < >.
Possible data are listed below.
Object Description Format
<Index>
<Object name>
Setting range
<Range>
Unit
<Unit>
Default
setting
<Default> Data
attribute
<Attribute>
Size <Size> Access <Access> PDO map <Possible/Not possible>
Name Description
Index Object index given by a four-digit hexadecimal number.
Name The object name.
Modes of operation Related operation modes.
All: All operation modes
csp: Cyclic synchronous position mode
csv: Cyclic synchronous velocity mode
cst: Cyclic synchronous torque mode
pp: Profile position mode
hm: Homing mode
Setting range The possible range of settings.
Unit Physical units.
Default setting Default value set before shipment.
Data attribute The timing when a change in the contents is updated for a writable object.
A: Always updated
B: Prohibited to change during motor operation or commands.
If it is changed during motor operation or commands, the reflection timing is
unknown.
C: Updated after the control power is reset, or after a Config command is executed via
EtherCAT communications.
D: Changeable only when the EtherCAT communications state is Pre-Operational
(Pre-Op).
R: Updated after the control power is reset.
It is not updated for a Config command via EtherCAT communications.
–: Write prohibited.
Size The object size is given in bytes.
Access Indicates whether the object is read only, or read and write.
RO: Read only.
RW: Read and write.
PDO map Indicates the PDO mapping attribute.
Possible (RxPDO): Reception PDOs can be mapped.
Possible (TxPDO): Transmission PDOs can be mapped.
Not possible: PDOs cannot be mapped.
Modes of Operation
 Loading...
Loading...
