3-24
3-1 Servo Drive Specifications
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
3
Specifications
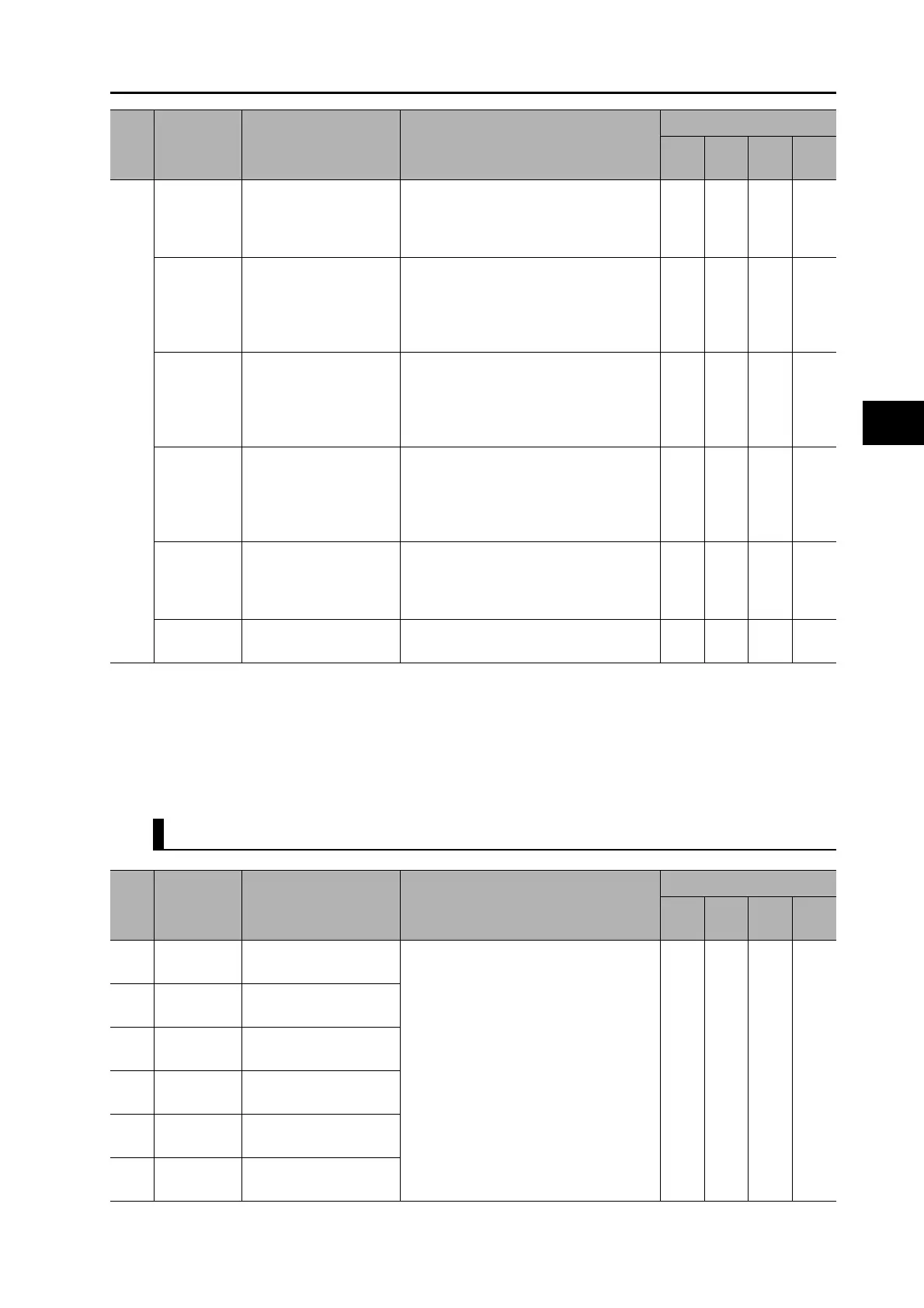
Be cautious that allocatable pin numbers are fixed for the following functions.
Error counter reset input (ECRST): Pin 30 only
Command pulse input prohibition input (IPG): Pin 33 only
The number in brackets indicates the pin number (allocation) at default setting. (The allocations
vary according to the control mode.)
CN1 Control Outputs
8, 9, 26 to 33
GESEL2
Electronic gear
switching 2
You can switch maximum 4 electronic
gear ratio numerators by combining with
electronic gear switching input 1
(GESEL1).
√√
VZERO
Zero speed designation
input
This signal forcibly sets the speed
command to 0.
Changes to enable (set value: 1 to 3)
according to the setting of Zero Speed
Designation Selection (Pn315).
√√
VSIGN
Speed command sign
input
Designates the motor rotation direction
for speed commands.
Changes to enable (set value: 1)
according to the setting of Speed
Command Direction Selection (Pn301).
√
TSIGN
Torque command sign
input
This signal designates the motor rotation
direction for torque commands.
Changes to enable (set value: 1)
according to the setting of Torque
Command Direction Selection (Pn318).
√√
STOP
Emergency stop input This is an emergency stop input.
When input, this becomes an
emergency stop input error and thereby
stop the motor.
√√√√
JSEL
Inertia ratio switching
input
This signal switches between inertia
ratio 1 and inertia ratio 2.
√√√√
Pin
number
Symbol Name Function and interface
Control mode
Position
Speed
Torque
Fully-
closed
Pin
number
Symbol Name Function and interface
Control mode
Position
Speed
Torque
Fully-
closed
21 +A
Encoder phase A
+output
Encoder signals (or external encoder
signals during fully-closed control) are
output according to the setting of
Encoder Dividing Numerator (Pn011).
This is the line-driver output (equivalent
to RS-422). The maximum output
frequency is 4 Mpps.
Phase Z is output for encoder signals (or
external encoder signals during fully-
closed control). This is the line-driver
output (equivalent to RS-422).
√√√√
22 -A
Encoder phase A -
output
49 +B
Encoder phase B
+output
48 -B
Encoder phase B -
output
23 +Z
Encoder phase Z
+output
24 -Z
Encoder phase Z -
output
 Loading...
Loading...