6
6-15
6-5 Encoder Dividing Function
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
Applied Functions
Encoder Dividing Ratio Setting (Pn011, Pn503)
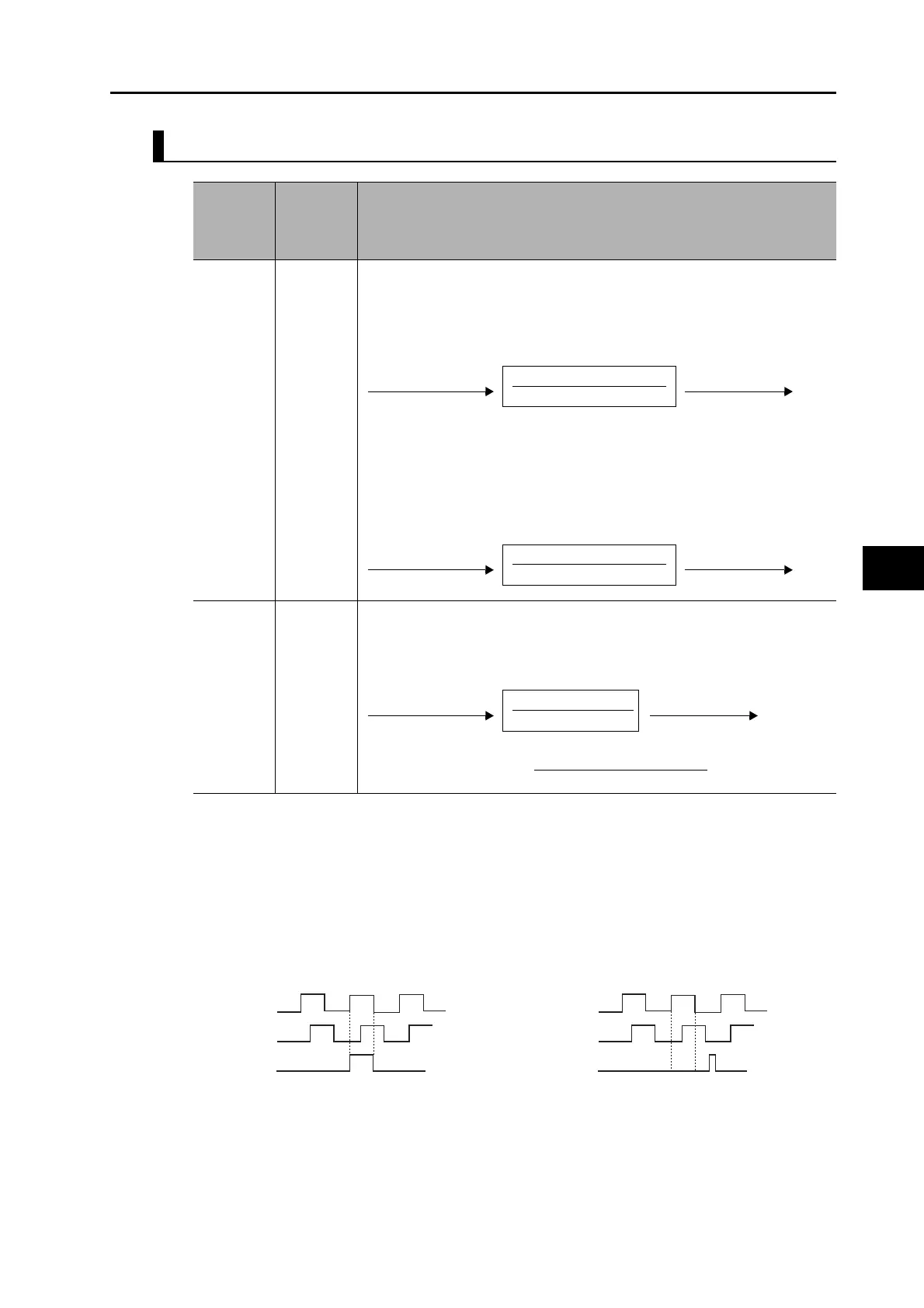
Phase Z Signal Output
1 phase-Z signal is output by 1 pulse per motor rotation. When the Encoder Dividing
Denominator (Pn503) ≠ 0, and if the pulse output resolution per rotation is not a multiple of 4,
phase-Z and phase-A outputs are not synchronized. The output will be made as an encoder
resolution, resulting in narrower width.
Encoder
Dividing
Numerator
(Pn011)
Encoder
Dividing
Denominator
(Pn503)
Explanation
1 to
262144
0
When the output source is the encoder
When Encoder Dividing Denominator (Pn503) = 0
This is set by Encoder Dividing Numerator (Pn011), and the output pulse is
the number of pulses set by Encoder Dividing Numerator (Pn011) as follows.
Number of pulse output per rotation = Encoder Dividing Numerator (Pn011)
× 4
When the output source is the external encoder
When Encoder Dividing Denominator (Pn503) = 0
The dividing ratio is 1:1.
1 to
262144
1 to
262144
When Encoder Dividing Denominator (Pn503) ≠ 0
The output pulse will be as follows based on Encoder Dividing Numerator
(Pn011) and Encoder Dividing Denominator (Pn503).
Encoder pulse
Pn011 set value × 4
Encoder resolution
Output pulse from
the drive
External encoder pulse
1
1
Output pulse from
the drive
Encoder pulse or
external encoder pulse
Pn011 set value
Pn503 set value
Output pulse from
the drive
Number of pulse output per rotation =
Encoder Dividing Numerator (Pn011)
Encoder Dividing Denominator (Pn503)
×
encoder resolution
If Pn011 and Pn503 are integers If Pn011 and Pn503 are not integers
 Loading...
Loading...