12-12
12-2 Parameter List
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
12
Appendix
005
Command
Pulse Input
Selection
Select the command pulse input.
0 − 0 or 1 Yes0 Photocoupler input
1 Input for line driver only
006
Command Pulse
Rotation Direction
Switching
Selection
Set the command pulse count direction.
0 − 0 or 1 Yes0 Forward direction
1 Reverse direction
007
Command
Pulse Mode
Selection
Set the command pulse mode.
1 − 0 to 3 Yes
090° differential-phase (A/B) inputs
1 Forward pulse/reverse pulse
290° differential-phase (A/B) inputs
3 Feed pulse and direction signal
008
Electronic Gear
Integer Setting
Set the number of command pulses per
motor rotation.
10000 Pulses 0 to 2
20
Yes
009
Electronic Gear
Ratio
Numerator 1
Set the electronic gear ratio.
If Pn009 = 0, the encoder resolution is set as
the numerator.
0 − 0 to 2
30
−
010
Electronic Gear
Ratio
Denominator
10000 − 1 to 2
30
−
011
Encoder Dividing
Numerator
Set the number of phase A and phase B
output pulses, respectively per motor rotation.
2500 P/r
1 to
262,144
Yes
012
Encoder Output
Direction
Switching
Selection
Select the phase B logic for pulse
regeneration output and the output source.
0 − 0 to 3 Yes
0
Phase B logic: Not reversed
Output source: Encoder
1
Phase B logic: Reversed
Output source: Encoder
2
Phase B logic: Not reversed
Output source: External encoder
3
Phase B logic: Reversed
Output source: External encoder
013
No. 1 Torque Limit
Set the No. 1 limit value for the output torque of the motor.
500 % 0 to 500 −
014
Error Counter
Overflow Level
Set the range of the error counter overflow
level. Detection of error counter overflow
level error is disabled if the set value is 0.
100000
Command
units
0 to 2
27
−
015
Operation
Switch when
Using Absolute
Encoder
Select the absolute encoder usage method.
1 − 0 to 2 Yes
0 Used as an absolute encoder.
1 Used as an incremental encoder.
2
Used as an absolute encoder.
(Multi-rotation counter overflows are
ignored.)
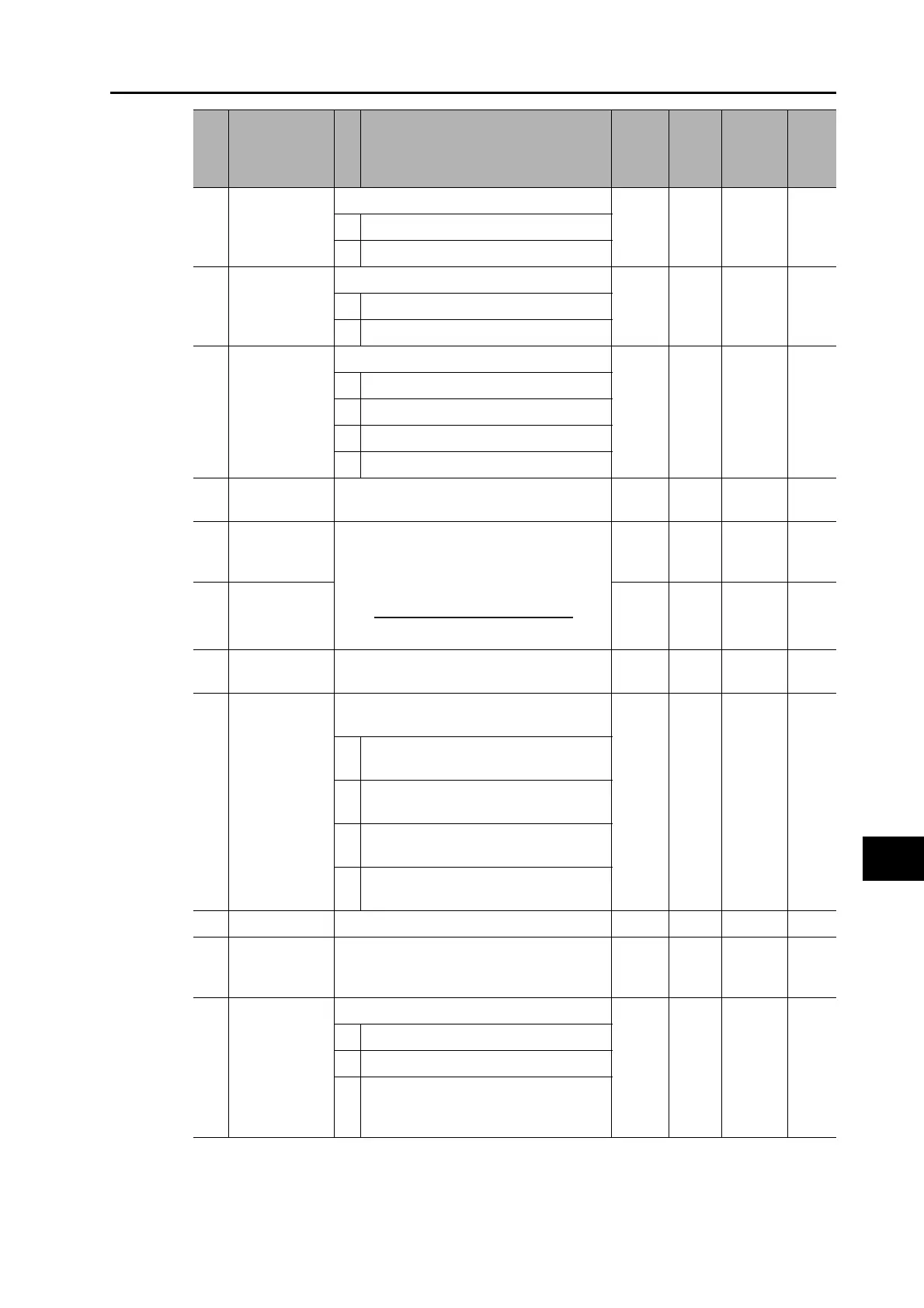
Pn number
Parameter
name
Description
Default
setting
Unit
Setting
range
Power
supply
OFF to
ON
Electronic gear ratio denominator (Pn010)
Electronic gear ratio numerator 1 (Pn009)
 Loading...
Loading...