12-15
12-2 Parameter List
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
12
Appendix
115
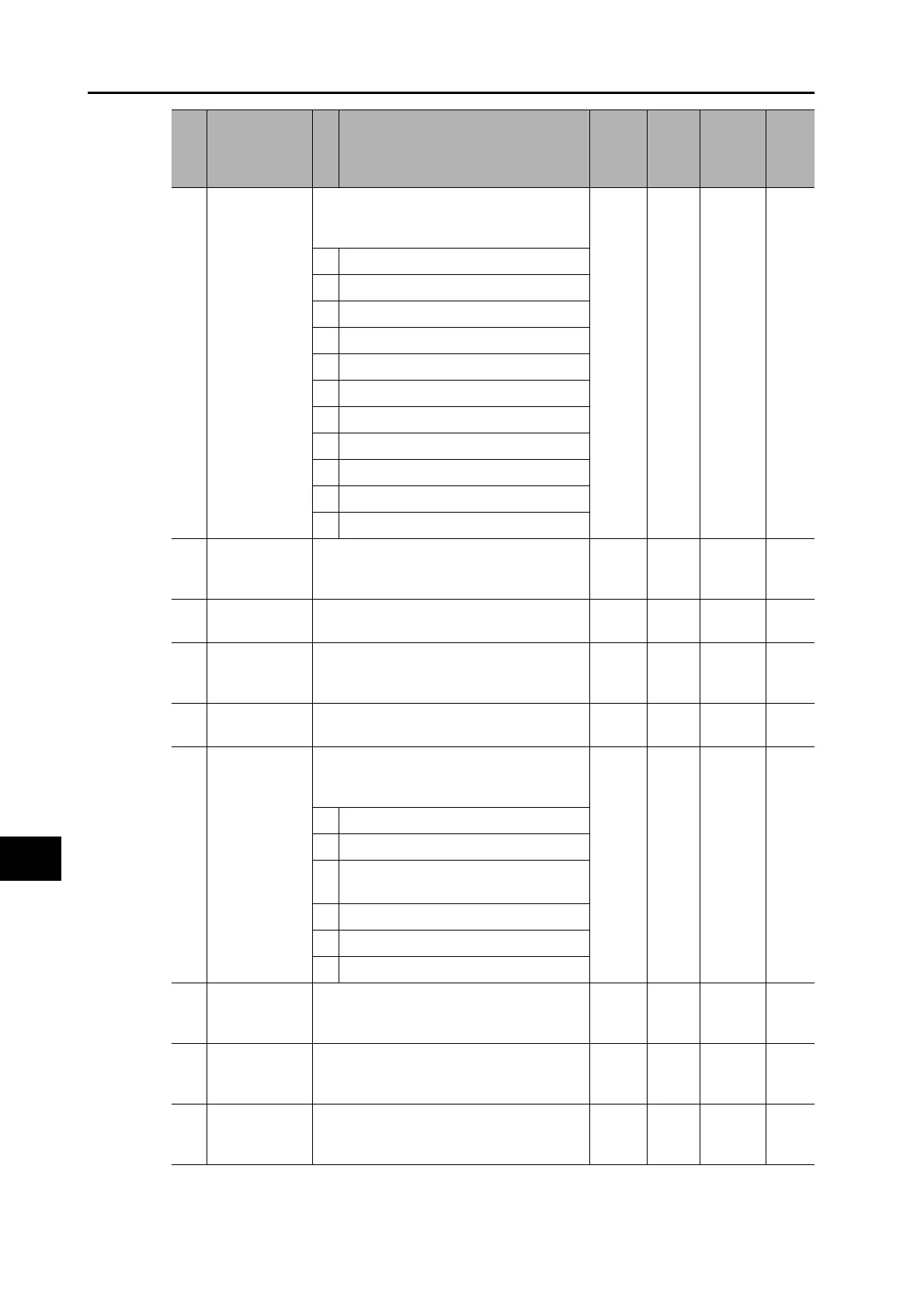
Switching Mode
in Position
Control
Select the gain switching condition for
position control.
It is necessary that Pn114 be set to 1.
0 − 0 to 10 −
0 Always gain 1
1 Always gain 2
2
Switching using gain switching input (GSEL)
3 Torque command change amount
4 Always gain 1
5 Command speed
6 Amount of position error
7 Command pulses received
8 Positioning completion signal (INP) OFF
9 Actual motor speed
10
Combination of command pulse input and speed
116
Gain Switching
Delay Time in
Position Control
Set the delay time for switching from gain 2
to gain 1.
50 0.1 ms
0 to
10,000
−
117
Gain Switching Level
in Position Control
Set the gain switching level. 50 −
0 to
20,000
−
118
Gain Switching
Hysteresis in
Position Control
Set the hysteresis for gain switching. 33 −
0 to
20,000
−
119
Position Gain
Switching Time
Set the position gain switching time for gain
switching.
33 0.1 ms
0 to
10,000
−
120
Switching Mode
in Speed
Control
Select the gain switching condition for speed
control.
It is necessary that Pn114 be set to 1.
0 − 0 to 5 −
0 Always gain 1
1 Always gain 2
2
Switching using gain switching input
(GSEL)
3 Torque command change amount
4 Speed command change amount
5 Command speed
121
Gain Switching
Delay Time in
Speed Control
Set the delay time for switching from gain 2
to gain 1.
00.1 ms
0 to
10,000
−
122
Gain Switching
Level in Speed
Control
Set the gain switching level. 0 −
0 to
20,000
−
123
Gain Switching
Hysteresis in
Speed Control
Set the hysteresis for gain switching. 0 −
0 to
20,000
−
Pn number
Parameter
name
Description
Default
setting
Unit
Setting
range
Power
supply
OFF to
ON
 Loading...
Loading...