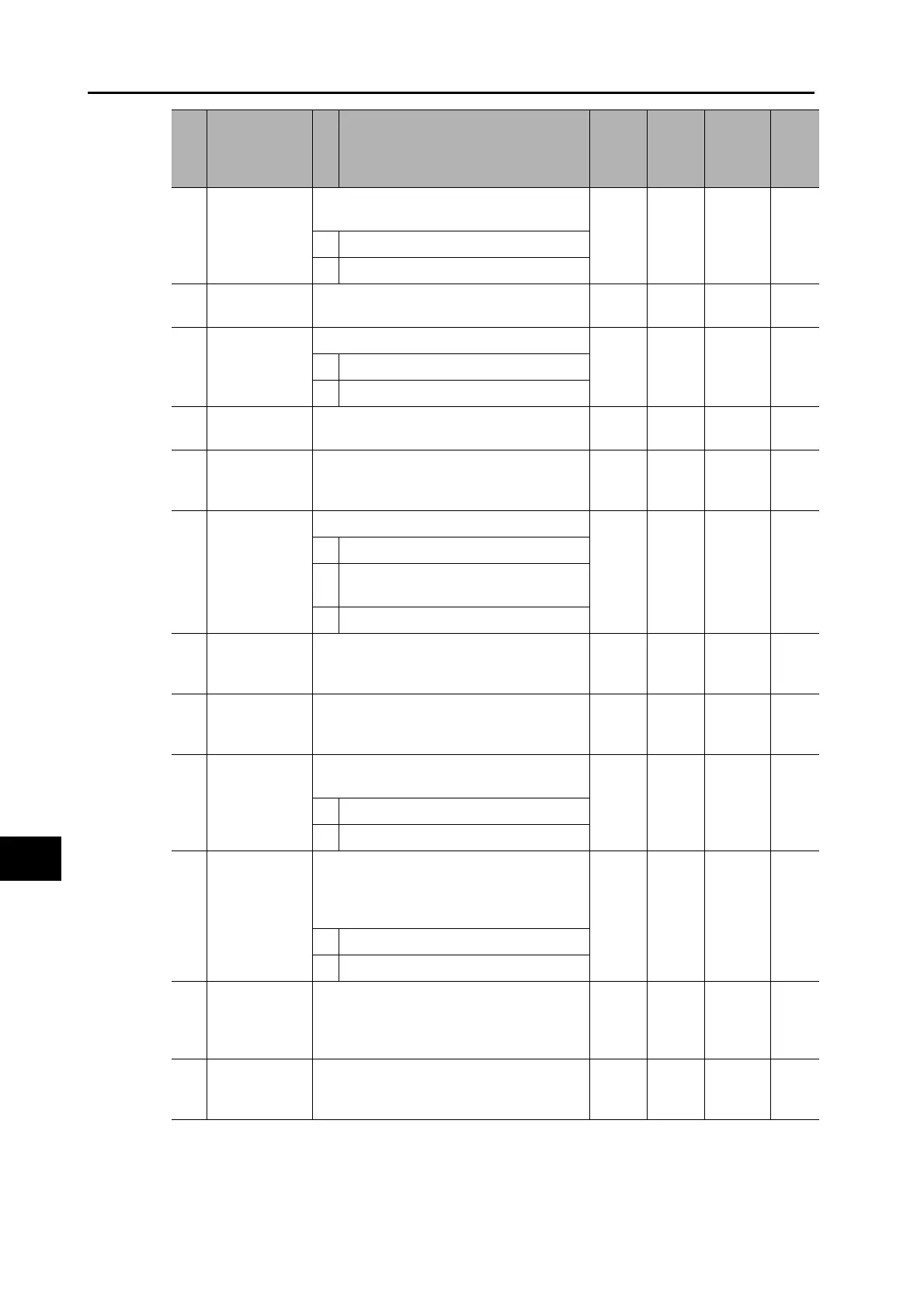
12-21
12-2 Parameter List
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
12
Appendix
318
Torque
Command
Direction
Selection
Select the method for selecting the direction
for the torque command.
0 − 0 or 1 −
0 Specified with the sign
1 Specified with VSIGN
319
Torque
Command Scale
Set the input gain for analog torque
command input.
30
0.1 V/
100%
10 to 100 −
320
Analog Torque
Command
Rotation Direction
Switching
Set the analog torque command input polarity.
0 − 0 or 1 −0 Forward operation
1 Reverse operation
321
Speed Limit
Value Setting
Set the speed limit value. 0 r/min
0 to
20,000
−
322
Reverse Direction
Speed Limit
Value Setting
Switch the speed limit value according to the
direction.
0r/min
0 to
20,000
−
323
External
Feedback Pulse
Type Selection
Select the external feedback pulse type.
0 − 0 to 2 Yes
090° phase difference output type
1
Incremental encoder with serial
communications
2 Reserved (Do not use this setting.)
324
External Feedback
Pulse Dividing
Numerator
Set the external feedback pulse dividing
numerator.
0 − 0 to 2
20
Yes
325
External Feedback
Pulse Dividing
Denominator
Set the external feedback pulse dividing
denominator.
10000 − 1 to 2
20
Yes
326
External
Feedback Pulse
Direction
Switching
Reverse the external feedback pulse count
direction by changing the setting.
0 − 0 or 1 Yes
0 Count direction not reversed
1 Count direction reversed
327
External
Feedback Pulse
Phase-Z Setting
Set disconnection detection in the phase-Z
unconnected state when the external
feedback pulse of a 90° phase difference
output type is used.
0 − 0 or 1 Yes
0 Enabled
1 Disabled
328
Internal/External
Feedback Pulse
Error Counter
Overflow Level
Set the threshold for feedback pulse
deviation errors.
16000
Command
units
1 to 2
27
Yes
329
Internal/External
Feedback Pulse
Error Counter Reset
Clear to 0 the feedback pulse error value for
each set rotation speed.
0
Rotations
0 to 100 Yes
Pn number
Parameter
name
Description
Default
setting
Unit
Setting
range
Power
supply
OFF to
ON
 Loading...
Loading...