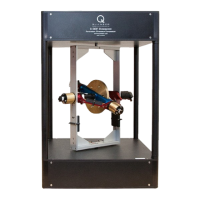
The Quanser Aero 2 is a compact, dual-rotor, two-degree-of-freedom aerospace system designed for educational and research purposes, specifically for mechatronics and flight-control-based experiments. It is not intended for public use and should only be operated by technically qualified personnel. The system comes equipped with either the QFLEX 2 USB or QFLEX 2 Embedded interface modules. The QFLEX 2 USB allows control via a computer through a USB connection, while the QFLEX 2 Embedded provides a 4-wire SPI interface for external microcontroller boards.
Function Description:
The Aero 2 is a versatile platform capable of three main configurations:
- 1 DOF VTOL (Vertical Take-Off and Landing): In this configuration, the pitch axis is unlocked, the yaw axis is locked, and both rotors are horizontal.
- 2 DOF Helicopter: Both pitch and yaw axes are unlocked, and the rear rotor is vertical.
- Half-Quadrotor: The pitch axis is locked, the yaw axis is unlocked, and both rotors are horizontal.
The tail rotor (motor 1) can be rotated to switch between the half-quad/1-DOF and 2-DOF configurations. The system utilizes pitch, thruster rotation, and yaw locks to achieve the desired configuration.
Important Technical Specifications:
DC Motors:
- Type: Two direct-drive 18V brushed DC motors (Allied Motion CL40 Series Coreless DC Motors, model 16705).
- Nominal Input Voltage (Vnom): 18.0 Volts
- Nominal Torque (Tnom): 22.0 mN·m
- Nominal Angular Velocity (ωnom): 3050 RPM
- Nominal Current (Inom): 0.540 Amps
- Terminal Resistance (Rm): 8.4 Ω
- Torque Constant (kt): 0.042 N·m/A
- Motor Back-EMF Constant (km): 0.042 V/(rad/s)
- Rotor Inertia (Jm): 4.0 × 10⁻⁶ kg·m²
- Rotor Inductance (Lm): 1.16 mH
Propellers:
- The system ships with two eight-vane counter-rotating 3D printed propellers, custom-designed for high dynamic coupling and strong cross-torque during thrust.
- High-efficiency propellers (APC 5.0x4.6, models LP05046E/EP) are also available for a less coupled configuration.
- Both propeller types are mounted using aluminum prop adapters with collets (E-flite part number EFLM1922).
Encoders:
- Motor Encoders: Single-ended optical shaft encoders, 2048 counts per revolution in quadrature mode (512 lines/rev) (US Digital E8P-512-118).
- Pitch Encoder: Single-ended optical shaft encoder, 2880 counts per revolution in quadrature mode (720 lines/rev) (US Digital E8P-720-118).
- Yaw Encoder: US Digital E3-1024-984 optical encoder, 4096 counts per revolution in quadrature (1024 lines/rev).
Inertial Measurement Unit (IMU):
- Type: Integrated TDK IIM-42652 inertial module mounted on the Aero core board.
- Function: Real-time measurement of angular position and velocity about all three primary axes.
- Accelerometer Range: 16-bit, +/-8g.
- Gyroscope Range: 16-bit, +/-500 deg/s.
Aero Body:
- Mass of Body (Mb): 1.07 kg
- Displacement of Center of Mass (Dm) (z-axis): -2.42 mm
- Pitch Inertia (Jp) (y-axis): 2.32 × 10⁻² kg·m²
- Yaw Inertia (Jy) (z-axis): 2.38 × 10⁻² kg·m²
- Thrust Displacement (Dt): 0.168 m
Amplifier:
- Type: PWM
- Peak Current: 2 Amps
- Continuous Current: 0.5 Amps
- Output Voltage Range (recommended): ±18 Volts
- Output Voltage Range (maximum): ±24 Volts
Power Supply:
- External DC Power Supply: Provides 24.0 V power at up to 2.71 A for sensors and motors.
- Input: 100-240 VAC at 50-60 Hz.
- Model: TRUMPower TTA65-24E-M4SG. Only the provided power supply and AC cord should be used.
Environmental Conditions:
- Usage: Indoor use only.
- Temperature: 15°C to 35°C
- Altitude: Up to 2000 m
- Relative Humidity: 30% to 60%
- Air Pressure: 86 kPa (860 mbar) – 106 kPa (1060 mbar)
- Pollution Degree: 2
- Mains Supply Voltage Fluctuations: Up to 10% of nominal voltage
- Maximum Transient Overvoltage: 2500 V
Usage Features:
The Quanser Aero 2 is designed for ease of setup and operation.
- Handling: When moving the Aero 2, lift it by gripping the support yolk just above the yaw pivot. Support the base with your other hand. Warning: Do not lift the Aero 2 by the Aero body.
- Setup Procedure:
- Ensure the power switch is OFF and connect the Aero 2 to a power supply.
- Connect the Aero 2 to the PC via USB or to the microcontroller via SPI connection.
- Ensure that a volume of space around the manipulator is dedicated as a work zone that users must stay clear of. The radius of this area should be at least 0.5 m.
- Check that the thrusters are oriented as required and locked firmly in position using the thumbscrews.
- Check that the pitch and yaw locking screws are engaged or disengaged as required for your task.
- Switch on the power switch and ensure that the status LED on the QFLEX 2 panel is green.
- The Aero 2 is ready for use.
- Interfacing: The system's data acquisition (DAQ) device connects motor position encoders to Encoder Input (EI) channels #0 and #1. EI #2 reads the pitch angle, and EI #3 reads the yaw angle. Analog Output (AO) channels control the power amplifier command for the DC fan motors. Analog Input (AI) channels are connected to the PWM amplifier current sense circuitry. The DAQ also controls integrated tri-color LEDs via an internal serial data bus. The DAQ can interface with a PC via USB (QFLEX 2 USB) or an external microcontroller via SPI (QFLEX 2 Embedded).
Maintenance Features:
- Balancing: The Aero 2 must be balanced before running any experiments. Two tungsten weights are mounted on each rotor and can be adjusted to balance the system. To balance, move the sliding masses all the way outwards. Identify the rotor that is leaning downwards and move its mass slider inwards until the system is balanced.
- ESD Protection: The Quanser Aero 2 core board components are sensitive to electrostatic discharge. Always ensure that you have been properly grounded before touching the board.
- Current and Temperature Management: Always monitor the current draw and motor temperature to ensure that you do not exceed the maximum current draw or 50°C.
- Conductive Material Caution: Do not allow conductive material to touch the Aero 2 core board as it can short and damage the electronics.
- User Modifications: While the end-effector board provides connections for external user devices, users are responsible for certifying any modifications or additions they make to the default configuration.
Compliance:
The device complies with Part 15 of the FCC rules, ensuring that it does not cause harmful interference and accepts interference received. It is a Class A digital apparatus compliant with Canadian ICES-003. It also meets essential requirements of European Directives for safety (2006/95/EC) and electromagnetic compatibility (2004/108/EC). This is a Class A product, and in a domestic environment, it may cause radio interference, in which case the user may be required to take adequate measures.
The device is marked with the Waste Electrical and Electronic Equipment (WEEE) symbol, indicating that it must be disposed of separately from municipal household waste. This ensures proper recycling and reduces environmental impact.