3
2916224
Kit Convertisseur de signal
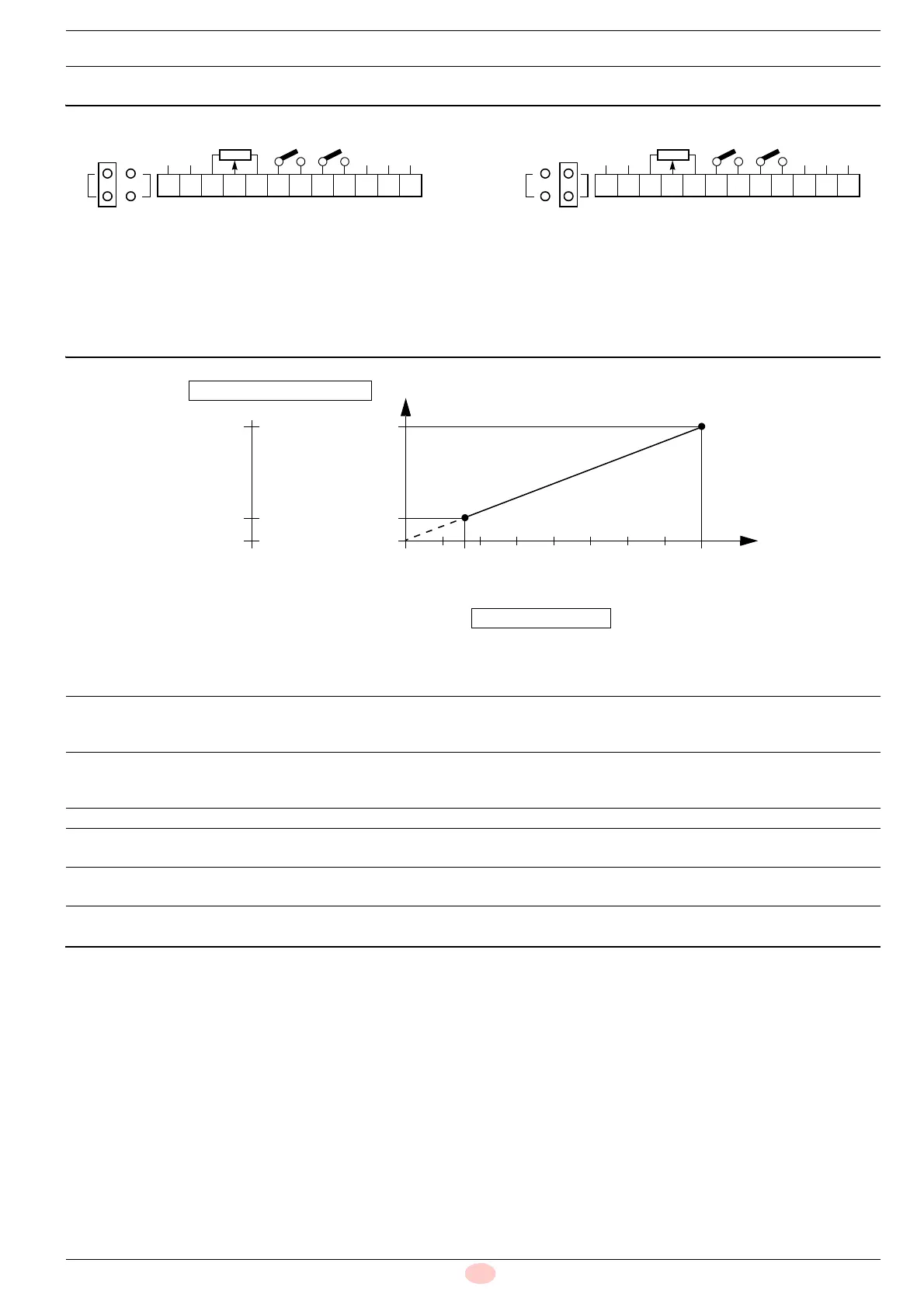
2.4 Raccordements borniers
2.5 Signal en entrée
Le signal d'entrée peut être facilement adapté à la course du ser-
vomoteur, comme reporté par la suite:
ou pour autres applications:
2.6 Réglage du convertisseur E 5202
Le convertisseur ne demande aucun réglage spécifique; il
adapte la position du servomoteur au signal d'entrée 0/
4÷20mA (o 0/2÷10V) par couplage à la valeur de la résis-
tance du potentiomètre.
Le convertisseur est équipé d'un trimmer (Bande Morte)
placé dans le panneau frontal; il est cependant conseillé de
régler le trimmer à la valeur maximum, (TRIM complètement
tourné dans le sens horaire), pour éviter une réaction trop
fréquente avec un repositionnement inutile du servomoteur
en cas de variation du signal d'entrée très petite.
La valeur maximum de la Bande Morte est 1%, qui corres-
pond à aucune réaction de repositionnement jusqu'à ce que
la variation du signal d'entrée est de plus de 0,2 mA (ou
0,1V) (angle d'environ 1°).
Fig. 2
123456789101112
230V
N
IN
+-
INC. DEC.
IN
V
mA
123456789101112
115V
N
IN
+-
INC. DEC.
IN
V
mA
Règlement effectué en usine
Alimentation électrique 230V
Signal en entrée: 0/4÷20mA
Programmations optionnelles (seulement si nécessaire)
En cas d'alimentation électrique à 115V déplacer le fil du
bornier 10 au bornier 11.
En cas de signal en entrée 0/2÷10V déplacer le shunt au
bornier V.
Fig. 3
2040
Stop
20%
100%
0%
[mA]
1020
[V]
POSITION SERVOMOTEUR
SIGNAL EN ENTRÉE
Puissance minimum
Puissance maximum
4 ÷ 20mA correspondent à
Position de MIN du servomoteur ÷ Position de MAX du servomoteur
(Puissance MIN ÷ Puissance MAX)
Voir diagramme.
2 ÷ 10V correspondent à
Position de MIN du servomoteur ÷ Position de MAX du servomoteur
(Puissance MIN ÷ Puissance MAX)
Voir diagramme.
0 ÷ 20mA correspondent à
Position de fermeture du servomoteur ÷ Position de MAX du servomoteur
Voir diagramme.
0 ÷ 10V correspondent à
Position de fermeture du servomoteur ÷ Position de MAX du servomoteur
Voir diagramme.