e = SP – PV
The loop error e brings about a change to the manipulated variable M.
The example above illustrates this very well: if, with a desired temperature of 20 °C (= command value
w), the room temperature is 22 °C (= process value PV), this results in the loop error:
e = SP – PV = 20 °C - 22 °C = -2 °C
In this case, the negative sign indicates a reversing action: the heat output is reduced.
In a control loop's state of equilibrium, the loop error is zero or very small. If the command variable
changes or there is a disturbance, a loop error arises. The loop error is corrected by means of the
manipulated variable M.
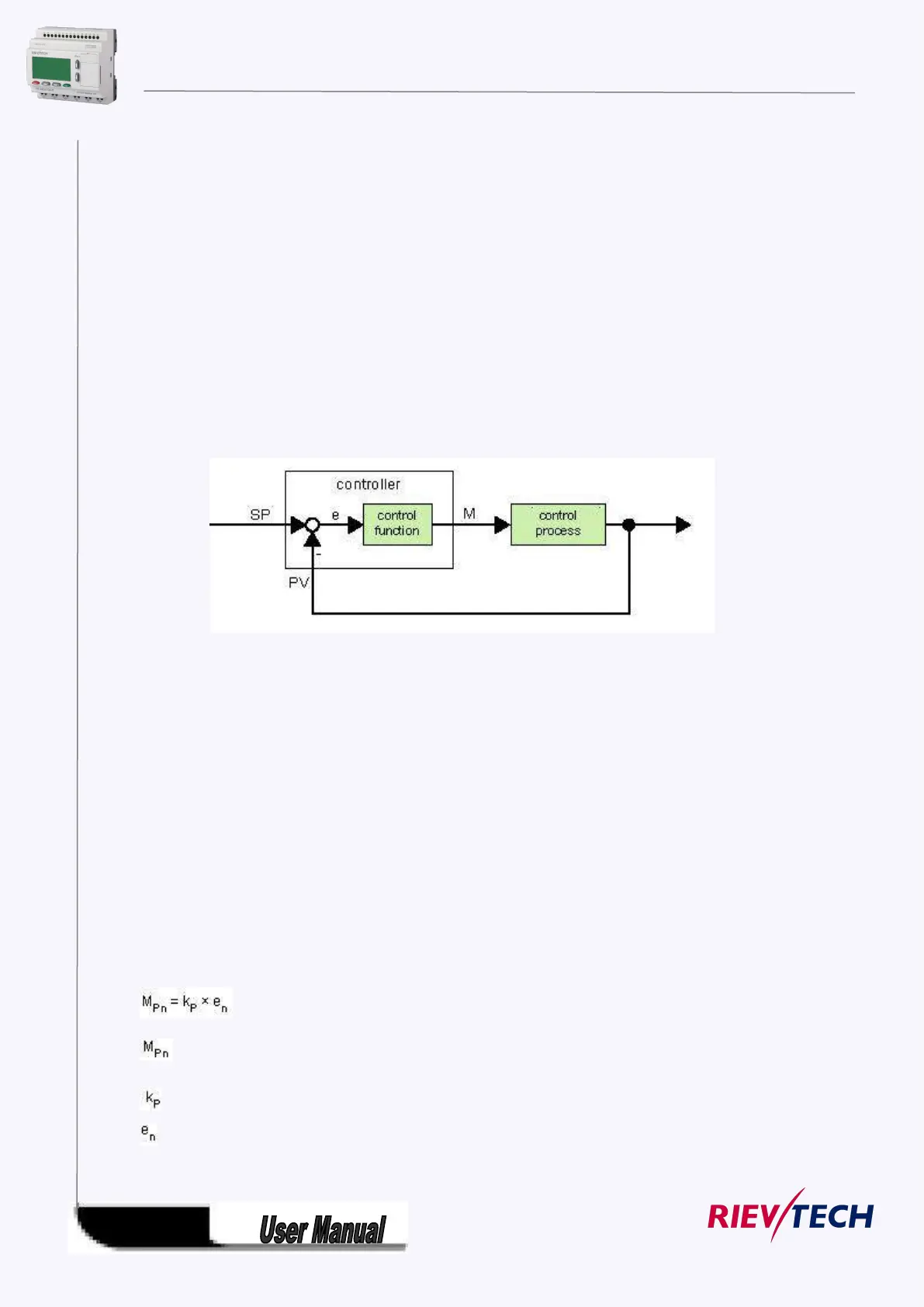
Controller basics
A controller can be simply portrayed as follows:
The comparing element and the controller function describe the conduct of the controller.
The following describes the most important types of controller. A controller's step response tells us a lot
about its conduct. The step response describes how a controller reacts to the erratic change in the
process value.
There are 3 important basic types of controller:
Proportional-action controller (P controller)
Integral-action controller (I controller)
Differential-action controller (D controller – we're not touching on this here)
These are combined for a real controller. For instance, the PI controller:
P Controller
A proportional-action controller (P controller) changes the manipulated variable M proportional to the
loop error. The P controller works immediately. By itself it cannot drive the loop error to zero.
:Manipulated variable of the P controller at the time n
:Gain of the P controller
: Loop error at the time n
The following picture shows a jump in process value and step response of the controller: