24-25
24 25
Die Einstell-Schritte
1) Knüppel-Richtung einlernen
• Im Einstellmodus muss die LED regelmäßig grün blinken, Elektroantrieb
muss ausgesteckt sein.
• Jetzt SET-Taste lange drücken und bei gedrückter Taste folgende
Vollausschläge am Sender machen (Reihenfolge egal):
Roll rechts, Nick vor, Heck Nase-rechts, und wieder neutral, Pitch max. und
so lassen.
Jetzt Taste loslassen. Der Richtungssinn darf ab jetzt nicht mehr am
Sender verändert werden! (außer absichtliche Pitch-Umkehr).
2) Servo-Richtung „Pitch“
(und Erkennung der Anlenkung H1/ tri-link)
LED muss 2x blinken (ggf. weiterschalten durch Tippen der SET-Taste).
Wenn man am Knüppel Pitch hochfährt, soll die Taumelscheibe
gleichmäßig und ohne Neigung nach oben gehen. Mit seitlichen Ausschlägen
am Roll-Knüppel kann man unter 10 Möglichkeiten vor- oder zurück-schaltend
die richtige auswählen. Abspeichern durch langen SET-Tastendruck (>1s).
3 ) Servo-Richtungen „Nick“ und „Roll“
LED muss 3x blinken (ggf. weiterschalten durch Tippen der SET-Taste). Nick-
Knüppel soll die Taumelscheibe gleichmäßig neigen ohne ihre Höhe zu än-
dern. Mit Roll-Ausschlägen kann man unter 2 oder 8 Möglichkeiten vor- oder
zurückschaltend die richtige auswählen.
Bei Einzelservo-Anlenkung: Nur mit Rechts-Roll-Ausschlägen zwischen den 2
Möglichkeiten umschalten. Falls zusätzlich die Roll-Richtung umgedreht wer-
den muss: einen lang dauernden Roll-Ausschlag nach links (> 1,5s) und mit
Links-Roll-Ausschlägen testen (nur möglich bei Geräteversionen mit zweistelli-
gem Code-Aufdruck auf dem Typenschild links der Artikelnummer. Bei anderen
Anlenkungs-Typen stimmt die Roll-Richtung nach dem Speichern automatisch.
Andernfalls sind Servo-Anschlüsse vertauscht oder Roll- oder Pitch-Richtung
falsch eingelernt. In diesem Fall die Schritte wiederholen). Abspeichern durch
langen SET-Tastendruck (>1s ► LED blinkt 4x). Jetzt müssten alle 3 Taumel-
Richtungen stimmen. Falls Taumelscheibe schief, jetzt mechanisch justieren.
4) Servo-Richtung „Heck“
Bei Gebrauch eines externen Kreisels diesen Punkt überspringen !
LED muss 4x blinken (ggf. weiterschalten durch Tippen der SET-Taste).
Mit Roll-Ausschlägen hin-und herschaltend die richtige Heckservo-Drehrich-
tung auswählen: Bei Heck-Knüppel nach rechts soll die Nase nach rechts wen-
den. Hierfür muss der Heckrotor nach rechts blasen. Jetzt lässt sich der Heck-
rotor-Neutralpunkt justieren, da im Schritt 4 das Heading-hold abgeschaltet ist.
Einstellung prüfen und durch langen SET-Tastendruck (>1s) abspeichern.
5a) Einbaulage (Sensor-Richtung) und Rotor-Drehrichtung
LED muss 5x blinken (ggf. weiterschalten durch Tippen der SET-Taste).
Der HeliCommand muss seine Einbau-Orientierung kennen, d.h. ob seine
runde Gehäuse-Seite nach rechts, links, vorne oder hinten weist.
Programmieren Sie dies, indem Sie mit dem Roll- bzw. Nick-Knüppel die
Taumelscheibe auf die betreffende Seite neigen und, während die Neigrich-
tung stimmt, mit langem SET-Tastendruck (>1s) bestätigen.
5b) Drehrichtung des Hauptrotors
Im Schritt 5 den Heck-Steuerknüppel in die selbe Richtung ausschlagen wie die
Rotor-Drehrichtung (von oben gesehen) und abspeichern mit SET-Taste > 1 s.
Abschließend
Neu einschalten und Steuerprobe machen. Am Sender nun ggf. Weg-Re-
duzierungen einstellen, gegen Anstoßen und für den richtigen Pitch-Bereich
(Ausschläge sind u.U. anders als die eines vorher im Sender bestandenen
Mischers).
Starke Weg-Minderungen sollten über den PC-Adapter im HeliCommand
eingestellt werden.
Falls Taumelscheibe nicht exakt horizontal liegt, jetzt nachjustieren.
Zur groben Justage: Es soll im mittleren Pitch-Bereich einen Punkt geben, an
dem alle Servo-Hörner gleichzeitig neutral stehen. Andernfalls Servohörner
abschrauben und richtig einsetzen.
Zur Fein-Justage: Schubstangen einstellen. End-Justage ist auch mit der
Sender-Trimmung möglich; diese danach mit SET-Taste neu einlernen (Schritt
C).
Bei Sendern mit verschiedenen Flugzuständen müssen alle Flugzustände, in
denen der HeliCommand aktiv ist, identische Trimmwerte haben!
(Im Rigid-Modus ist dies besonders wichtig).
26-27
26 27
Einstellung HeliCommand RIGID
Vor dem Einsatz in paddellosem Hubschrauber bitte unbedingt den
RIGID-Modus (per PC) aktivieren.
Die lagehaltende Stabilisierung („Kopf-Kreisel“) hält eine einmal gesteuerte
Neigung fest und verhindert Aufbäumen auch gegen Wind, soweit es die
Reaktionskraft des Hubschraubers vermag. Im übrigen steuert sich der Hub-
schrauber wie gewohnt.
Man sieht die Funktion an der Taumelscheibe, da sie in der gesteuerten
Schräglage verbleibt.
Je nach Einstellung ist vor dem Start Vorsicht geboten, damit die Taumel-
scheibe nicht versehentlich (durch langsames Driften oder unbeabsichtigte
Ausschläge) zu stark schräg steht und dass die RIGID-Empfi ndlichkeit nicht zu
hoch eingestellt ist. Sie muss nicht, wie bei Heck-Kreiseln oft praktiziert, knapp
an die Grenze zum Pendeln hochgestellt werden.
Paddellose Hubschrauber dürfen mit dem HeliCommand unbedingt nur mit
eingeschaltetem RIGID-Modus fl iegen! Andernfalls besteht die Gefahr dass zu
hohe Roll-/Nick-Raten entstehen, welche die Sensoren intern übersteuern und
den Horizontal-Modus sowie den Positions-Modus erheblich irritieren können!
Bei Scale-Modellen ist die Kopf-Anlenkung in der Regel auf etwa halbierten
Ausschlag eingestellt. Dies kann beim Einbau des HeliCommand rückgängig
gemacht werden, d.h. Ausschläge mechanisch erhöhen, um optimale Stabili-
sierungskraft zu erhalten.
Die RIGID-Stabilisierung ist per PC aktivierbar. Bitte sehen Sie, nachdem die
Grund-Version installiert wurde, nach der aktuellsten Softwareversion unter
www.robbe.com/rsc im Bereich Downloads nach.
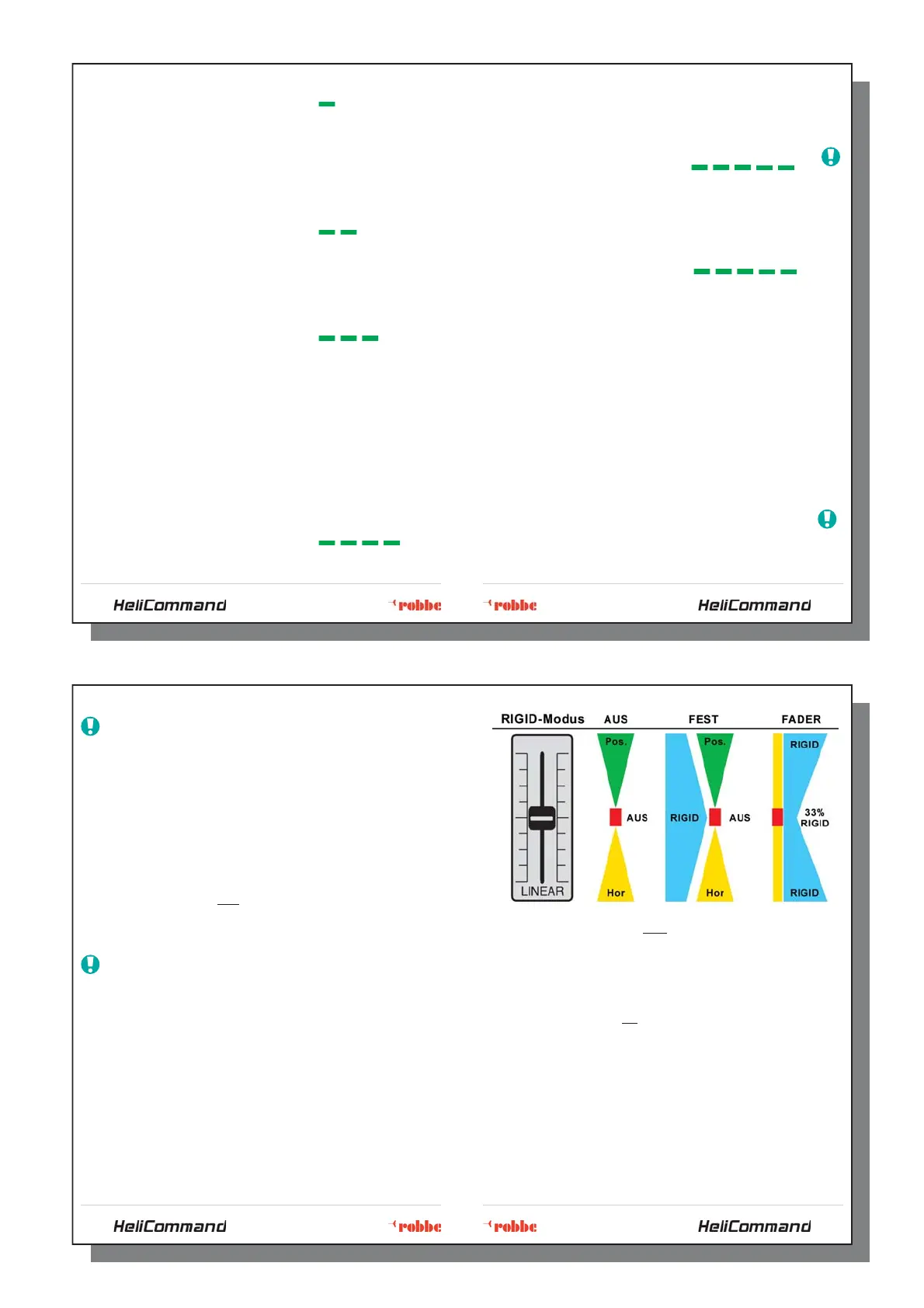
Es gibt folgende RIGID-Möglichkeiten:
Modus [AUS]
entspricht dem HeliCommand 3D. Nicht für paddellose Hubschrauber !
Modus [FEST]
aktiviert die RIGID -Funktion ständig (zusätzlich zum am Pilotkanal wählbaren
Hor.- und Pos.-Modus). Besondere Vorsicht wegen der RIGID-Empfi ndlichkeit,
weil sie in diesem Modus nicht über den Pilot-Kanal während des Fluges ein-
stellbar ist und zu hohe Werte gefährliche Schlinger- oder Pendelbewegungen
bewirken können. Einstellung nur über den PC unter „RIGID-Empfi ndlichkeit“!
Modus [FADER]
Deaktiviert Hor.- und Pos.-Modus. Das Steuern entspricht dem des „herkömm-
lichen“ Hubschraubers, Neigung muss aktiv gesteuert werden! In beiden Hälf-
ten des Pilot-Kanals (Schieber) wird nur die RIGID-Stabilisierung eingeblen-
det, bis zum Maximalwert der am PC einstellbaren „RIGID-Empfi ndlichkeit“.
Die Maximalstellung am Schieber (Richtung egal) entspricht genau der Mit-
telstellung im Modus [FEST]. Schieber zur Mitte reduziert die Empfi ndlichkeit
des „Kopf-Kreisels“ (für Nick und Roll gleichermaßen) auf 33%. Geeignet zum
Finden der optimalen RIGID-Empfi ndlichkeit. Wird später auf Modus [FEST]
gewechselt, sollte man entsprechend der gefundenen Schieberstellung die RI-
GID-Empfi ndlichkeit am PC prozentual verringern. (Bsp.: Rigid-Empf. Roll=7,
Schieber ca. 70%, d.h. neue Rigid-Empf.=7x70%=4,9; also 5 einstellen!)