140
Chapter 4 Method Parameters
)LJ
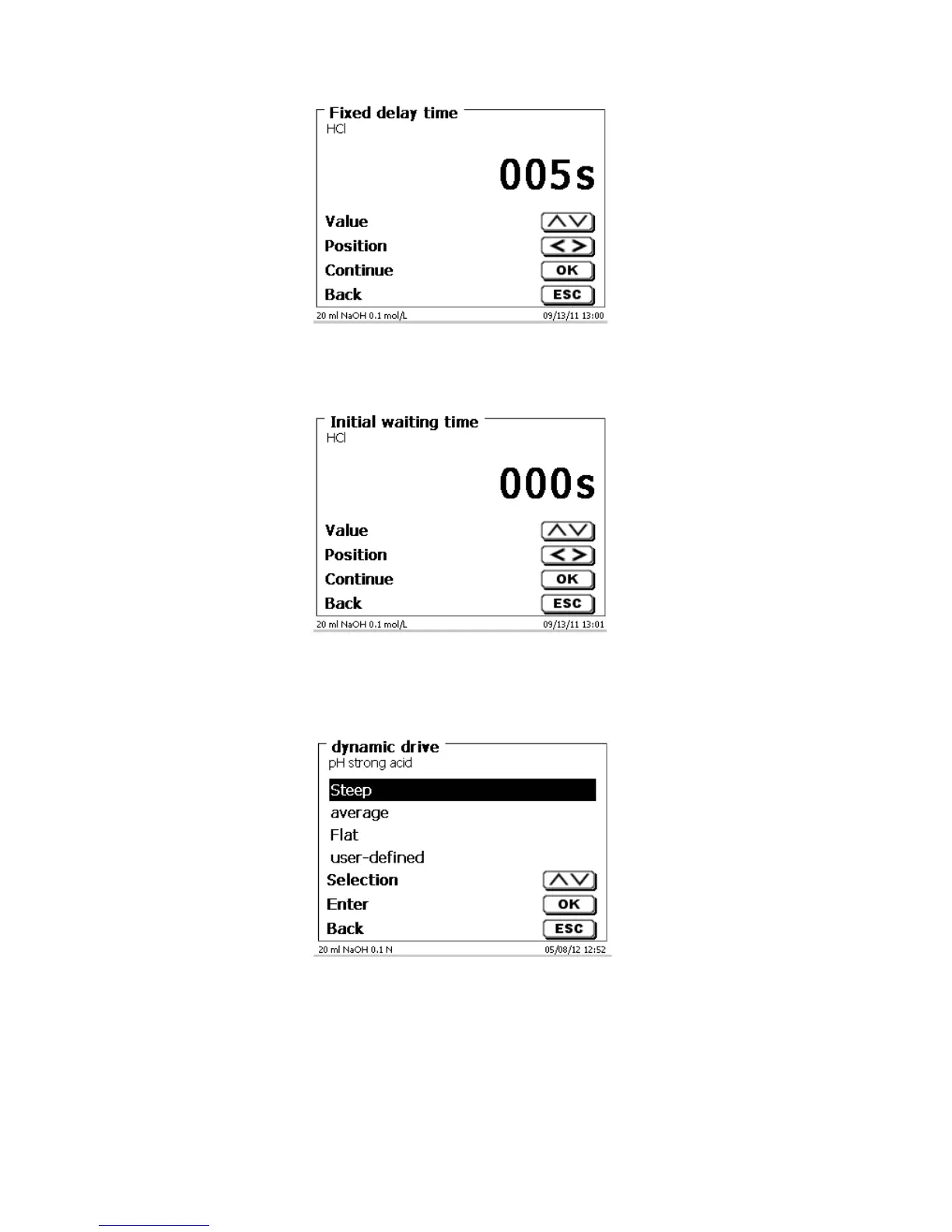
$IWHUWKHVWDUWRIWLWUDWLRQLWPDNHVIUHTXHQWO\VHQVHWRKDYHWKHVDPSOHVWLUUHGRYHUDGHILQHGSHULRGRIWLPHIRU
LQVWDQFHWR DOORZIRUWKH VDPSOHWREH GLVVROYHG7KH ZDLWLQJ WLPHWR EHREVHUYHG SULRU WR WKH ILUVWDGGLWLRQRI
WLWUDWLRQVROXWLRQFDQEHVHWXVLQJWKH<Initial waiting time>LWHP7KHLQLWLDOZDLWLQJWLPHFDQEHVHWEHWZHHQ
DQGVHFRQGV
)LJ
Dynamic control
,I G\QDPLF FRQWURO ZDV VHOHFWHG RQH KDV D VHOHFWLRQ RI GLIIHUHQW VWDJHV VWHHS PHGLXP DQG IODW 7KH XVHU
GHILQHGG\QDPLFSDUDPHWHUVFDQRQO\EHVHWRQWKH7LWUR/LQH
2QWKHILUVWWKUHHVWDJHVERWKWKHG\QDPLF
SDUDPHWHUVDQGWKHPLQLPXPDQGPD[LPXPVWHSVL]HVDUHGHIDXOWHG
)LJD