Strasbaugh Software Calibration Procedures
Version 4.0 - February 1998 10 - 13
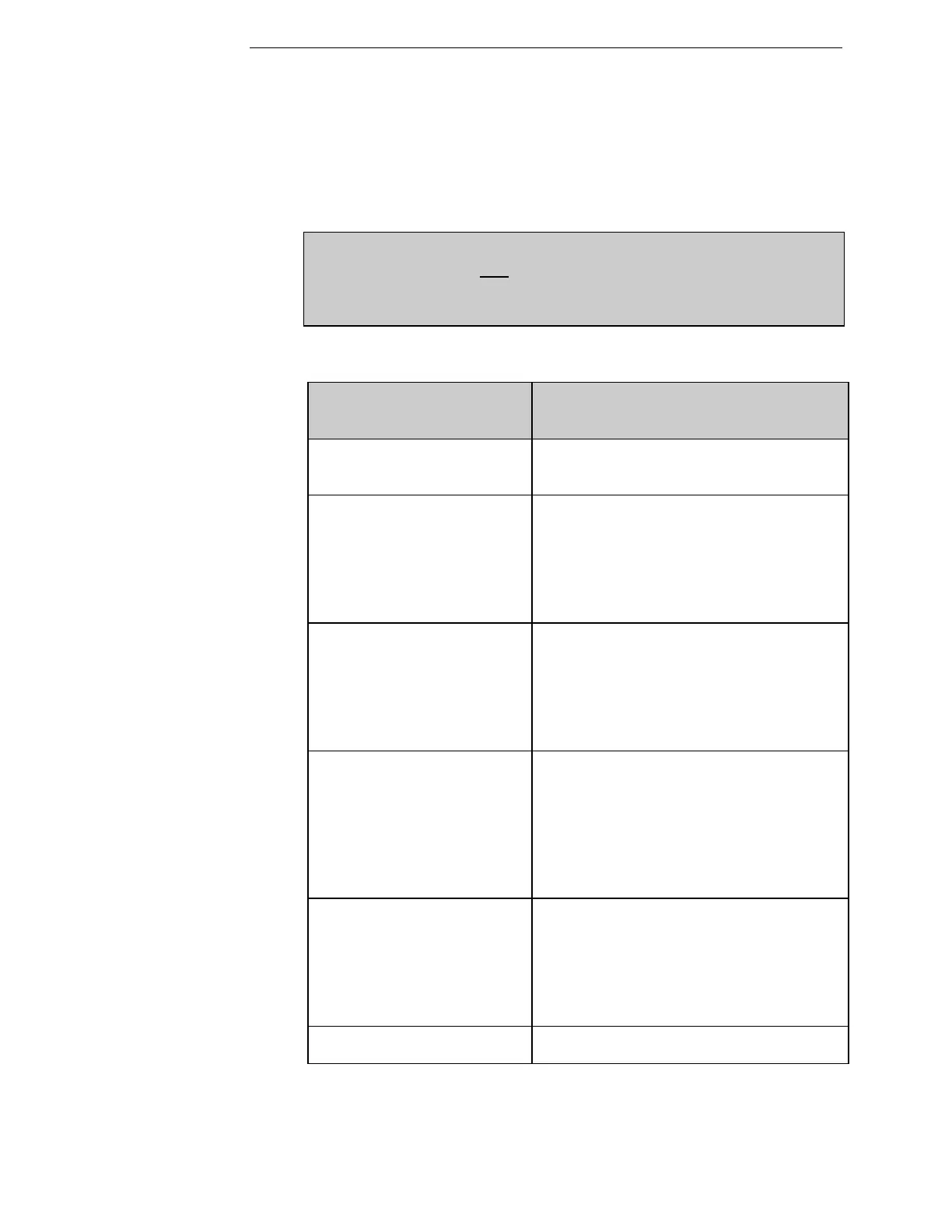
FUNCTION KEY CHOICES AVAILABLE AT PAGE 1 OF THE
MANUAL CONTROL MENU
CAUTION! Do not move the bridge with an unloaded
carrier in the machine.
Key Label Function(s)
Shuttle Move
Front
Rear
Moves the shuttle to the front or rear. Spindles
must be up. If moving to the rear, the robot
must be out of the way.
Bridge Move
Load
Middle
Pol Tbl 1
Pol Tbl 2
Left Curtain
Right Curtain
Moves the bridge to the selected position.
Spindles must be up. Conditioner arm must be
parked for moves over the primary table.
Robot Move
Left Send
Right Send
Left Recv
Right Recv
Left Load
Right Load
Moves the robot to the selected position.
The robot arms must be at zero.
Note: The optional scrubber is installed at
the right receive elevator.
Robot Arms Move
Zero
Left Send
Right Send
Left Recv
Right Recv
Left Load
Right Load
Moves the robot arms to the selected position.
Robot must be at correct station. At load
stations, spindles must be up. At second table
load stations, robot Z must be "above load" to
move to zero.
If at an elevator station, the elevator must be
stopped.
Robot Up/Down Move
Top
Middle
Bottom
Above Load
Left Load
Right Load
Moves the robot Z-axis to the selected position.
End Effector On/Off
Turns the robot arm end effector vacuum on
and off.
 Loading...
Loading...