Frequency
K
I
KP
K
D
Zero 1
Zero 2
Pole 2
Increasing f
s
causes the whole Bode plots to shift to right
Pole 1
Gain
Digital PFC Description
www.ti.com
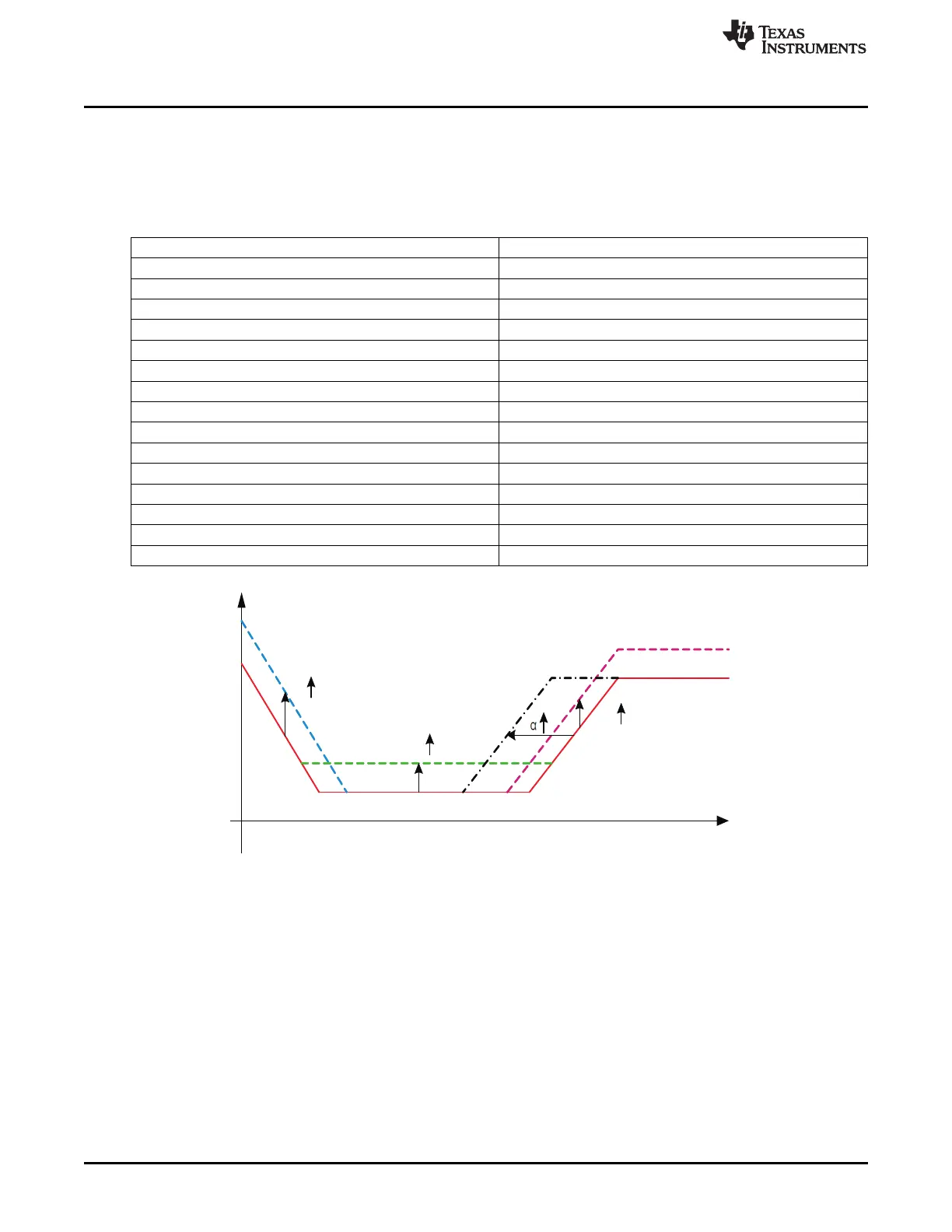
12.9.2 Feedback Loop Compenstaion Tuning with PID Coefficients
When fine tuning the feedback control loop, one would like to know each parameter in PID how to affect
the control loop characteristics without going through complicated description of the above equations.
Table 6 below helps this and is visually shown in Figure 40.
Table 6. Tuning with PID Coefficients
Control Parameters Impact on bode plot
KP Increasing KP
• Pushes up the minimum gain between the two zeros.
• Moves the two zeros apart.
KI Increasing KI
• Pushes up integration curve at low frequencies.
• Gives a higher low frequency gain.
• Moves the first zero to the right.
KD Increasing KD
• Shifts the second zero left.
• Does not impact the second pole.
α Increasing α
• Shifts the second pole to the right.
• Shifts the second zero to the right.
T
s
= 1 / f
s
Increasing the sampling frequency f
s
:
• Causes the whole Bode plot to shift to right.
Figure 40. Tuning PID Parameters
12.9.3 Feedback Loop Compensation with Multiple-Set of Parameters
The digital control provides more flexibility to establish PID coefficients in multiple sets to adapt various
operation conditions. For example, the single-phase PFC EVM has two sets of PID coefficients, set A is
for low-line operation when the line voltage is between 90 V
AC
and 160 V
AC
; while set B is for high-line
operation when the line voltage is above 160 V
AC
until 264 V
AC
.
12.10 Voltage Feedback Loop
The voltage feedback loop is a slow response loop with cross-over frequency is usually designed below
20 Hz to reduce the effect from AC line frequency. PI control is usually sufficient in this feedback loop
control. During high-transient operation which causes large bulk-voltage deviation greater than certain
values, for example, over 5%, digital control can adapt this high-transient requirement to use a different
set of PI coefficients.
44
Digitally Controlled Single-Phase PFC Pre-Regulator SLUU885B–March 2012–Revised July 2012
Submit Documentation Feedback
Copyright © 2012, Texas Instruments Incorporated