NANJING XIANFEI ROBOT TECHNOLOGY CO., LTD.
11
Z-2 User Manual
The MAV_1_MODE is recommended as Custom.
The AUX1 and AUX2 are just examples, which can be dened according
to actual situation. It should be congured in RC Map for further
application.
The trigger mode is just an example, which can be modied according
to actual situation.
The RC1~RC3 are just examples, which can be dened according to
actual situation.
The MNT1_TYPE is recommended as 6. The MNT1_ROLL_MAX, MNT1_
ROLL_MIN, MNT1_PITCH_MAX, MNT1_PITCH_MIN, MNT1_YAW_MAX
and MNT1_YAW_MIN will be congured automatically depend on data
from the GCU. The angle limit should be set manual while the MNT1_
TYPE is 4.
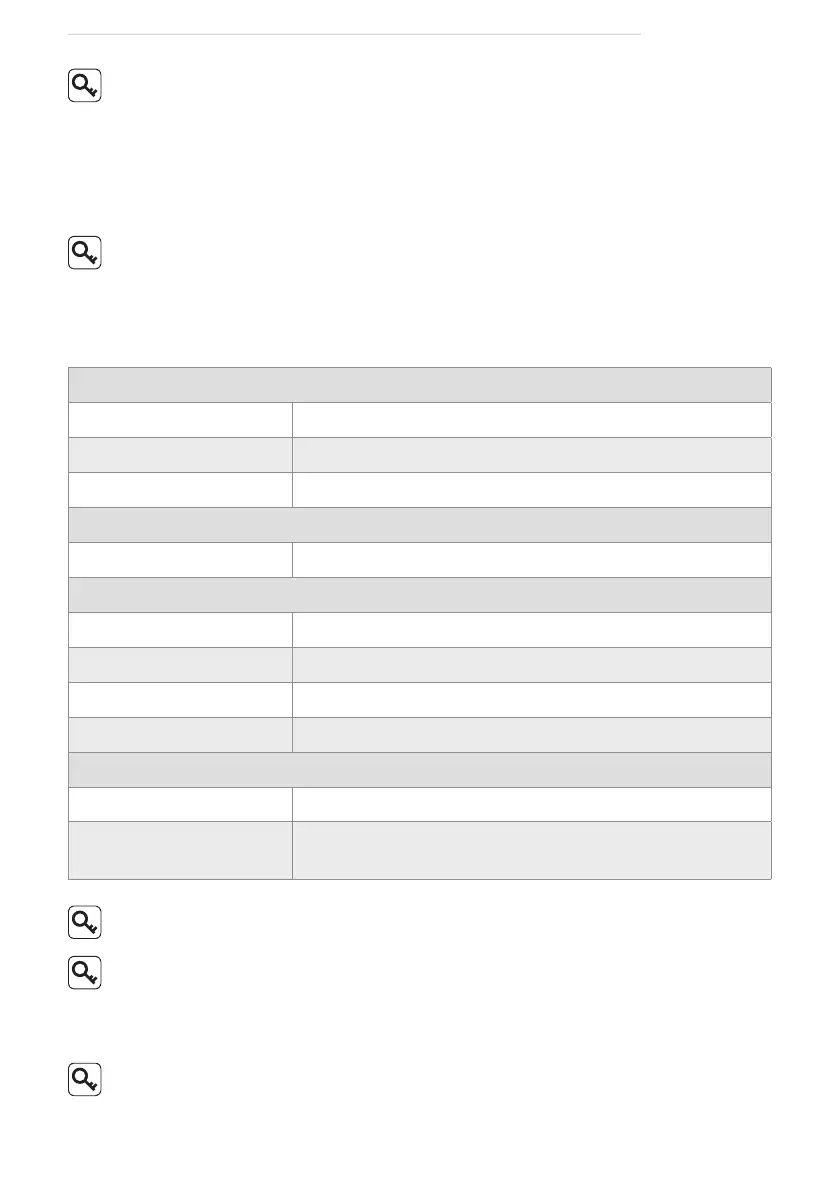
PX4
MAVLink
MAV_1_CONFIG TELEM2
MAV_1_MODE Custom / Gimbal
MAV_1_RATE 115200 B/s
Serial
SER_TEL2_BAUD 115200 8N1
Mount
MNT_MAIN_PITCH AUX1
MNT_MAIN_YAW AUX2
MNT_MODE_IN Auto (RC and Mavlink Gimbal)
MNT_MODE_OUT MAVLink gimbal protocol v2
Camera Setup
Trigger mode Distance based, on command (Survey mode)
Trigger interface
MAVLink (forward via MAV_CMD_IMAGE_START_
CAPTURE)