10
NANJING XIANFEI ROBOT TECHNOLOGY CO., LTD.
Z-2 User Manual
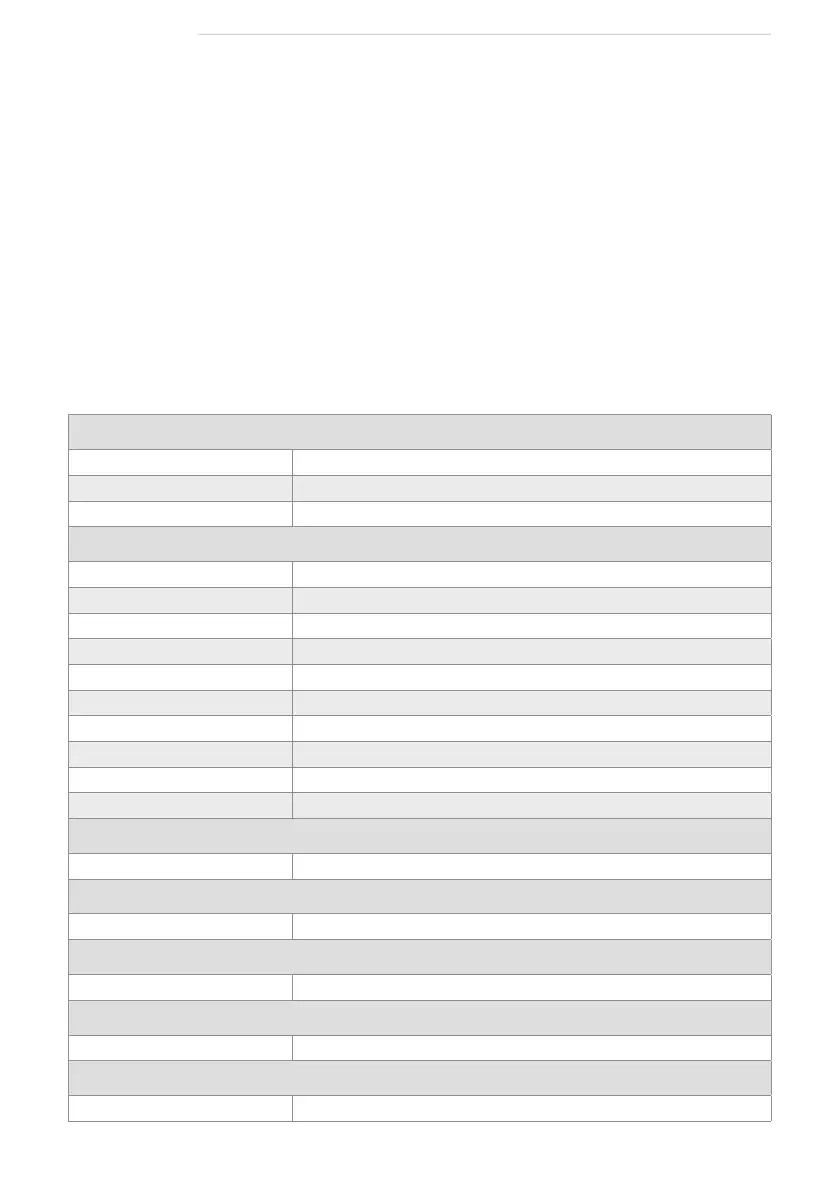
Appendix 2 MAVLink Conguration
SERIAL1
SERIAL1_BAUD 115
SERIAL1_OPTIONS 1024
SERIAL1_PROTOCOL 2
SR1
SR1_ADSB 0 Hz
SR1_EXIT_STAT 0 Hz
SR1_EXTRA1 0 Hz
SR1_EXTRA2 0 Hz
SR1_EXTRA3 0 Hz
SR1_PARAMS 0 Hz
SR1_POSITION 0 Hz
SR1_RAW_CTRL 0 Hz
SR1_RAW_SENS 0 Hz
SR1_RC_CHAN 0 Hz
MNT1
MNT1_TYPE 4 (Gremsy) / 6 (SToRM32 Mavlink)
RC1
RC1_OPTOPN 213 (MOUNT1_PITCH)
RC2
RC2_OPTOPN 214 (MOUNT1_YAW)
RC3
RC3_OPTOPN 163 (MOUNT1_LOCK)
CAM
CAM_TRIGG_TYPE 3 (Mount)
ArduPilot
[1] Reference dimension of person: 1.8x0.5m. Critical dimension under Johnson criteria
is 0.75m
[2] Reference dimension of light vehicle: 4.2x1.8m. Critical dimension under Johnson
criteria is 2.3m
[3] Reference dimension of large vehicle: 6.0x4.0m. Critical dimension under Johnson
criteria is 4.9m