Page 43
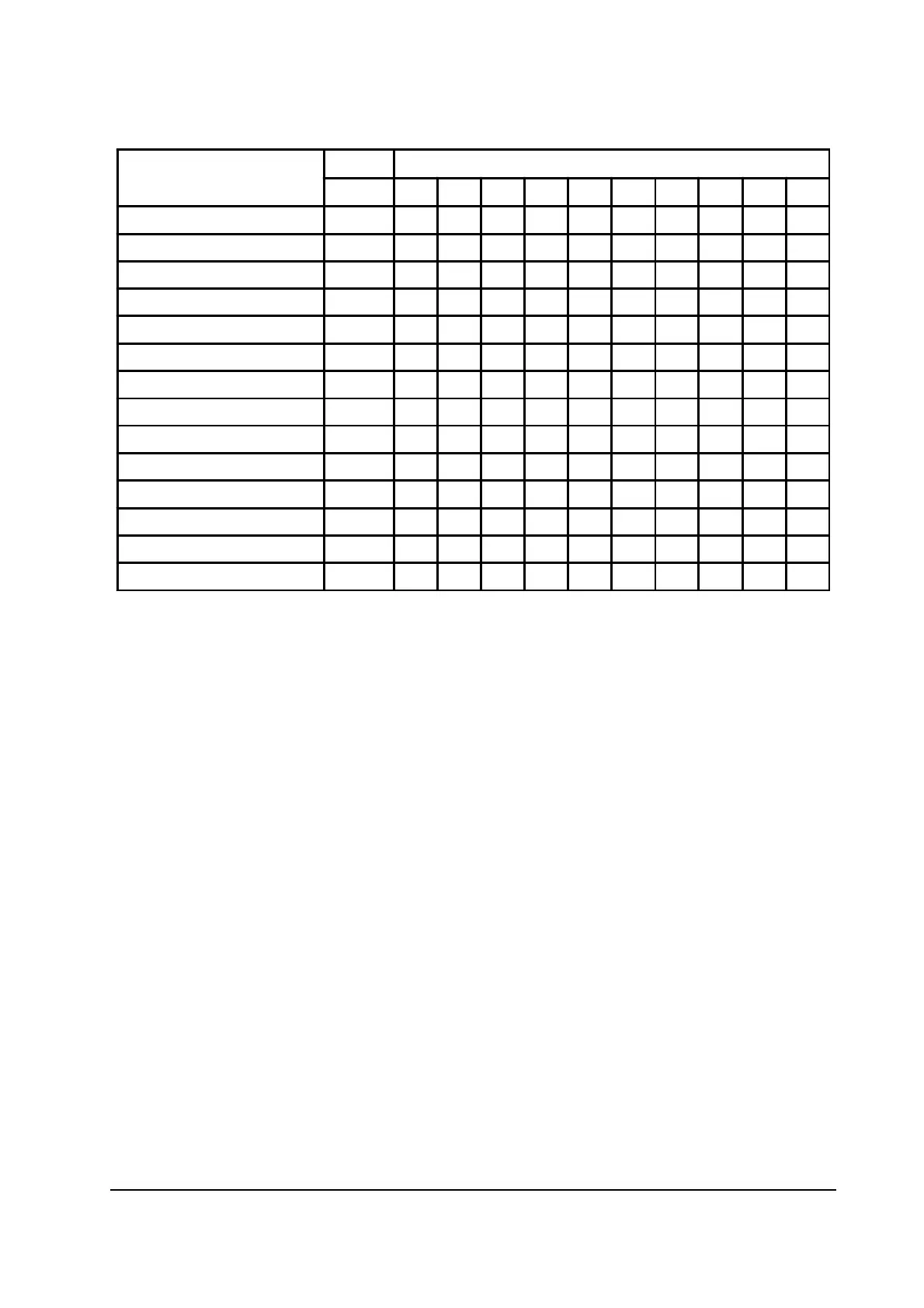
The following table shows the different values at which the parameters can be set.
PARAMETER PROGRAMMED LEVEL
UNIT0123456789
ACCELERATION DELAY (*) Sec. 2.5 3.0 3.5 4.0 4.5 5.0 5.5 6.0 6.5 7.0
RELEASE BRAKING (**) Sec. 5.5 5.0 4.5 4.0 3.5 3.0 2.5 2.0 1.5 1.0
INVERS BRAKING (**) Sec. 5.5 5.0 4.5 4.0 3.5 3.0 2.5 2.0 1.5 1.0
PEDAL BRAKING (**) Sec. 5.5 5.0 4.5 4.0 3.5 3.0 2.5 2.0 1.5 1.0
SPEED LIMIT BRAKING (**) Sec. 8.9 8.3 7.7 7.1 6.6 6.0 5.5 4.9 4.4 3.8
BRAKE CUTBACK (**) Sec. 5.5 5.0 4.5 4.0 3.5 3.0 2.5 2.0 1.5 1.0
MAX SPEED FW Hz 65 80 95 110 125 140 155 170 185 200
MAX SPEED BW Hz 65 80 95 110 125 140 155 170 185 200
CUTBACK SPEED %Max Sp 10 20 30 40 50 60 70 80 90 100
FREQUENCY CREEP Hz 0.3 0.6 0.9 1.2 1.5 1.8 2.1 2.4 2.7 3.0
MAXIMUM CURRENT % IMAX 47 53 58 64 70 76 82 88 94 100
BACKING SPEED Hz 0 2 4 6 8 1012141618
BACKING TIME Sec. 0.2 0.5 1.0 1.4 1.8 2.3 2.7 3.1 3.6 4.0
AUXILIARY TIME Sec. 0 1 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5
After changing a parameter, press ENTER to confirm data when requested by the mes-
sage on the console. Parameters modified and optimized on one unit can be stored by the
console (SAVE) and then released (RESTORE) on another chopper, thus allowing fast and
standardized settings (see console manual for details).
(*) The acceleration time shown is the time from 0 Hz to 100 Hz. This is the ideal ramp
calculated by the software; the real ramp could change as a function of motor control
parameter setting and, obviously, as a function of the load.
(**) The braking feature is based upon deceleration ramps. The value shown in the table
is the time to decrease the speed from 100 Hz to 0 Hz. This is the ideal ramps calcu-
lated by the software; the real ramp could change as a function of motor control pa-
rameter setting and, obviously, as a function of the load.