Page 66 MS - SOUND decoders MS440 to MS990 and MN - NON-SOUND decoders MN170 to MN340
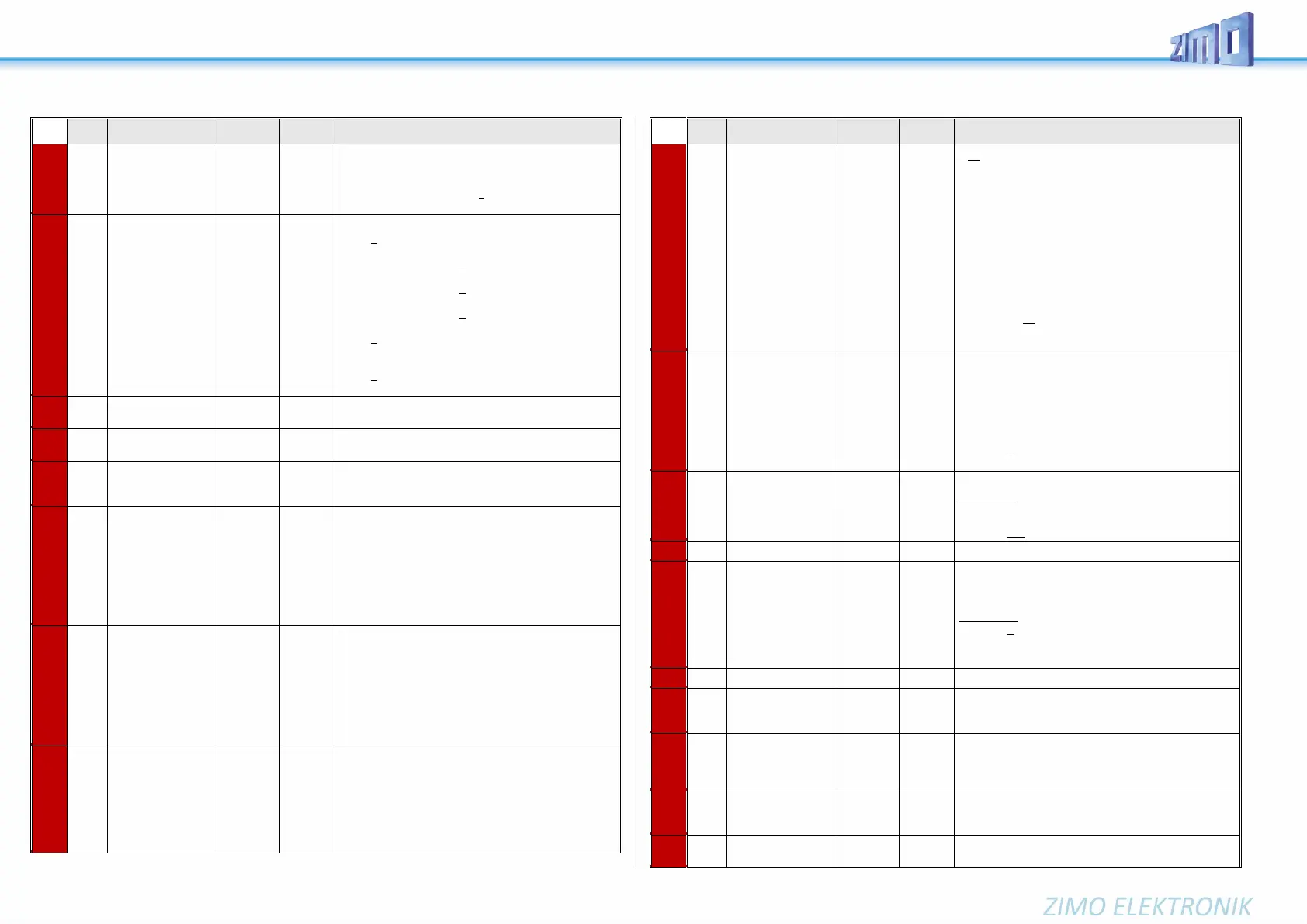
Bit 0 - RailCom Channel 1 (Broadcast)
Bit 1 - RailCom Channel 2 (Data)
Bit 6 - High voltage RailCom (large scale decoders onl.)
for all Bits: 0 = OFF 1 = ON
14 =
0000 1110
Bit 3 = 1
(RailCom
is switched
on),
and
Bits 1,2 = 1
(28 or 128
speed steps
and auto-
matic analog
operation
enabled)
Bit 0 - Train direction:
0 = normal, 1 = inverse
Bit 1 - number of speed steps
0 = 14, 1 = 28/128 speed steps
Bit 2 - automatic change to analog operation
0 = disabled, 1 = enabled
Bit 3 - RailCom („bi-directional communication“)
0 = deactivated 1 = activated
Bit 4 - Individual speed table:
0 = off, CVs #2, #5 and #6 are active.
1 = on, according to CVs #67 – #94
Bit 5 - Decoder address:
0 = primary address as per CV #1
1 = ext. address as per CVs #17 & #18
Function mapping for F0 forward
Function mapping for F0 reverse
Function mapping
F1 - F12
Function mapping for F1 - F12
Signal controlled
(HLU, ABC)
Acceleration
ZIMO signal-controlled speed influence method (HLU)
using MX9 or StEin:
or
when using the “asymmetrical DCC signal” stopping
method:
The value multiplied by 0.4 equals acceleration time in
seconds from stop to full speed.
Only CV #3 OR CV #49 is used, depending on which value is
higher.
Signal controlled
(HLU, ABC) braking
distance
ZIMO signal-controlled speed influence (HLU) with ZIMO
MX9 track section module or StEin
or
when using the “asymmetrical DCC signal” stopping
method:
The value multiplied by 0.4 equals deceleration time in
seconds from full speed to stop.
Only CV #4 OR CV #50 is used, depending on which value is
higher.
Signal controlled
(HLU) speed limits
#52 for “U” (Ultra
low)
#54 for “L” (Low
speed)
#51, #53, #55 inter-
mediate steps
ZIMO signal-controlled speed influence method (HLU)
using MX9 or StEin:
Defines the internal speed steps for each of the 5 speed
limits generated by HLU.
P and I value
for
PID motor regulation
(= EMF-load bal-
ance control)
The value of this CV
will be automatically
transferred to CVs
#147 - #149
01 - 199
modified
Setting
= 55: Default motor control using medium
values in PID parameters P and I (Diff = 0).
= 0: equal to 0 (is converted automatically)
<> 55 and <> 0: modified settings
Tens digit 1 - 4: Proportional value of the PID-motor reg-
ulation, lower than default
Tens digit 6 - 9: Proportional value of the PID-motor reg-
ulation, higher than default
Ones digit 1 - 4: Integral value of the PID regulation
lower than default
Ones digit 6 - 9: Integral value of the PID regulation
higher than default
Typical test values against jerky driving:
CV #56 = 55 (default) → 33, 77, 73, 71, ...
ATTENTION: The values 10, 20, 30, 40, 50, 60, 70, 80 and
90 are NOT allowed!
Absolute voltage in tenth of a volt applied to the motor at
full speed (max. throttle setting). A useful (and well func-
tioning) range is 10 to 24 V (i.e. 100-240), and lower than
the expected track voltage.
EXAMPLE: A system from another manufacturer is set to
22 V at idle but drops to 16 V under load: A good setting
would be CV #57 = 140 - 150.
CV #57 = 0: automatically adapts to the track voltage (rel-
ative reference); only useful with stabilized track voltage.
BEMF intensity
SW version 5.00 and
higher
Intensity of back-EMF control at the lowest speed step.
EXAMPLES:
CV #58 = 0: no back-EMF (like unregulated decoders),
CV #58 = 150: medium compensation,
CV #58 = 255: maximum compensation.
Dimming the func-
tion outputs =
voltage reduction of
the function outputs
by PWM
Generally, this af-
fects all function out-
puts.
Reduction of function output voltage with PWM (pulse
width modulation), to reduce the light’s brightness, for ex-
ample.
EXAMPLES:
CV #60 = 0 or 255: full voltage
CV #60 = 170: 2/3 of full voltage
CV #60 = 204: 80 percent of full voltage
= 97: NMRA mapping “without left-shift”
Brake light (code 001110xx in CV #125ff): Afterglow in
tenths of a second (i.e. range 0 to 25 sec) at standstill after
stopping
Modifications
of lighting effects
Tens digit: Changing cycle time for various effects (0 - 9,
default 5), or brighting up at soft start at 001101 (0 - 09
sec)
Ones digit: Extends off-time
Bit 7 - 4: define a ditch light key (function key+1)*16 con-
sequent: 0=F2, 1=F0, 2=F1,.. 15=F14
Bit 3 - 0: Ditch light OFF time modification [s]
If there are subversions to the SW version in CV #7, it is
read out in CV #65.
 Loading...
Loading...