Addressing Reference
1785 PLC-5
22
T
able P
Example
PID Control Addresses
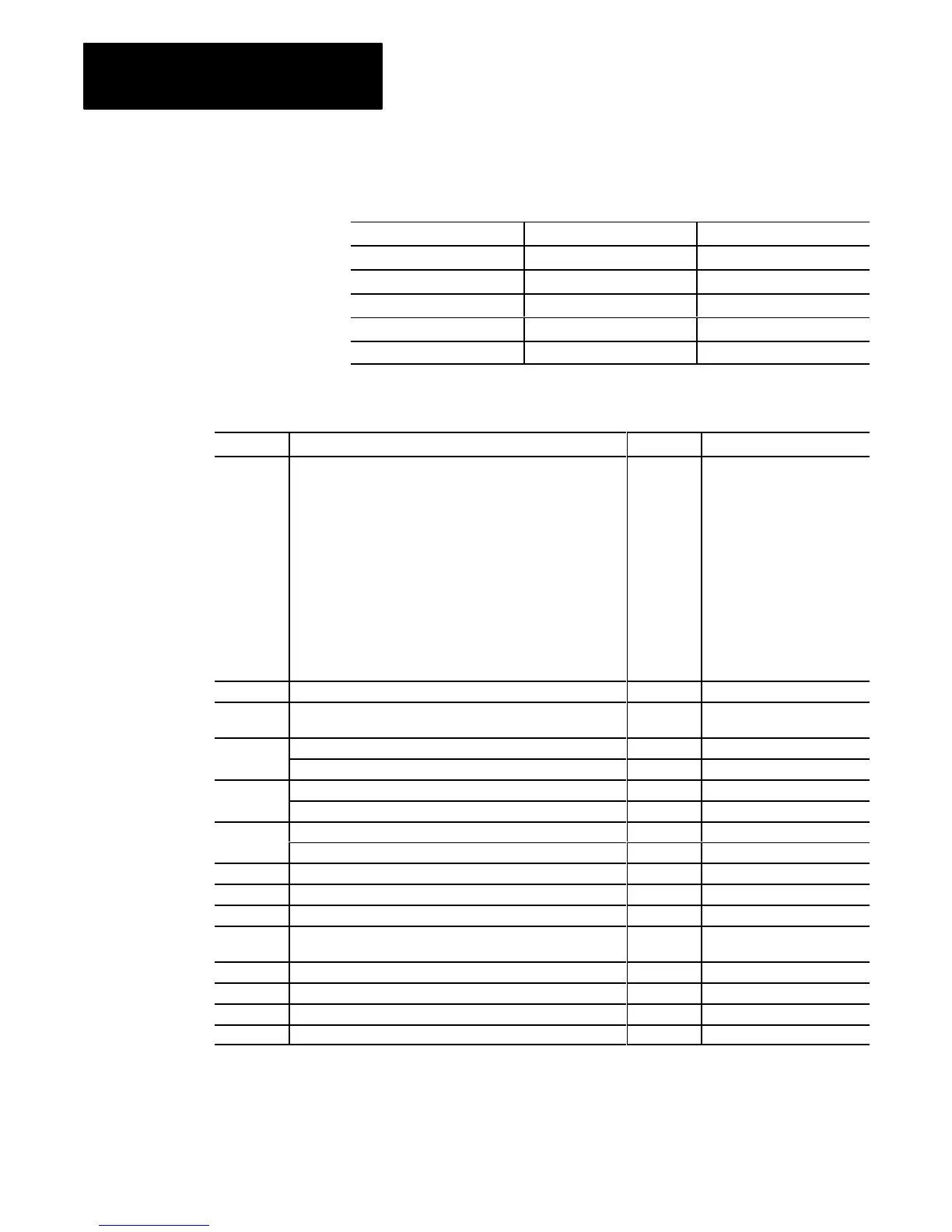
To Address: PLC Data Type: Example Address:
Whole PD Control Structure structure $PD13:0
Set-point value IEEE float $PD13:0.SP
Proportional-gain value IEEE float $PD13:0.KP
PID-initialized bit bit $PD13:0.INI
SP out-of-range bit bit $PD13:0.SPOR
T
able Q
PID
Control Block in Integer File
Word: Contains: Term: Range:
0 Bit 15 Enabled (EN)
Bit 13 Done (DN)
Bit 11 Set point out of range
Bit 10 Output alarm, lower limit
Bit 9 Output alarm, upper limit
Bit 8 DB, set when error is in DB
Bit 7 Resume last state (0 = yes, 1 = hold last state)
Bit 6 Derivative action (0 = PV, 1 = error)
Bit 5 Setpoint descaling (0 = no, 1 = yes)
Bit 4 Set output (0 = no, 1 = yes)
Bit 3 Output limiting ((0 = no, 1 = yes)
Bit 2 Control (0 = direct, 1 = reverse)
Bit 1 Mode (0 = automatic, 1 = manual)
Bit 0 Equation (0 = independent, 1 = ISA)
1 reserved
2 Setpoint SP 0 thru 4095 (unscaled)
S
min
thru S
max
(scaled)
3
Independent: Proportional gain (unitless) K
P
0 thru 327.67
ISA: Controller gain (unitless) K
C
0 thru 327.67
4
Independent: Integral gain (1/s) K
I
0 thru 327.67
ISA: Reset term (minutes per repeat) T
I
0 thru 327.67
5
Independent: Derivative gain K
D
0 thru 327.67
ISA: Rate term x 100 (minutes) T
D
0 thru 327.67
6 Feedforward or bias FF/Bias 0 thru 4095
7 Maximum scaling S
max
–32,768 thru +32,767
8 Minimum scaling S
min
–32,768 thru +32,767
9 Dead band DB 0 thru 4095 (unscaled)
S
min
thru S
max
(scaled)
10 Set output SETOUT 0 thru 100%
11 Maximum output limit (% of output) L
max
0 thru 100%
12 Minimum output limit (% of output) L
min
0 thru 100%
13 Loop update time (seconds) dt 0.01 thru 327.67

 Loading...
Loading...
