BL6-U Parallel Integrated Controller Quick Commissioning User Manual
28
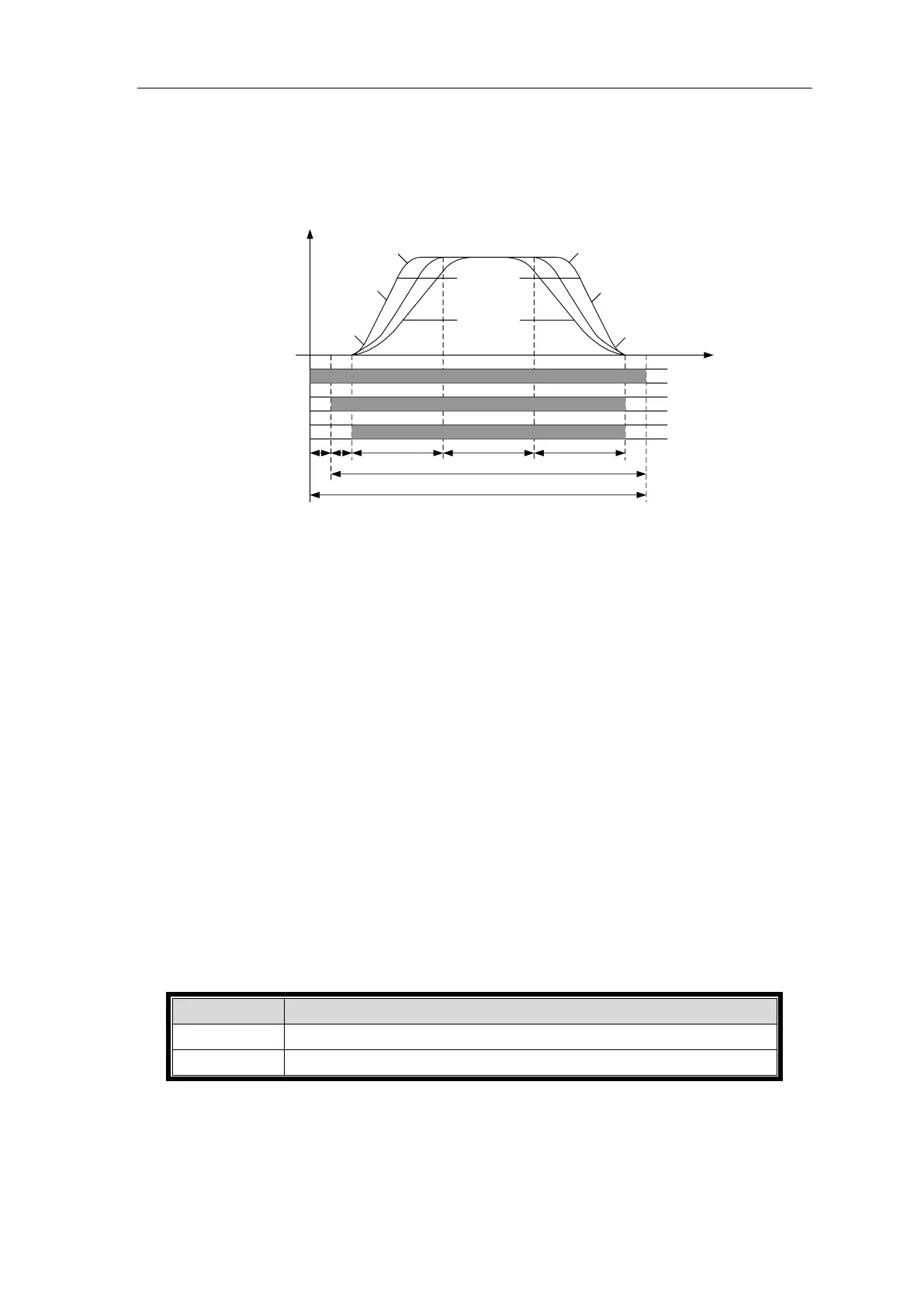
9.3 Elevator normal speed comfort level adjustment
Adjustments for Start/Brake Speed curve.
Elevator running speed curve is shown below.
b1
p2
p3
b2
p1
p4
bp increases,
the curve
steepens
bp decreases,
the curve
gentles
t
f
t
s
t
d
t
2
t
k
t
1
t
q
Direction
Brake release
Speed given
time
Speed
t
1
Direction forming time t
q
Acceleration time at starting
t
2
Direction keeping time t
d
Deceleration time at braking
t
k
Advanced time for brake release t
f
One cycle of running
t
s
Running time at constant speed
Figure 9.3 Elevator running speed curve graphic
Note: In the guarantee of elevator operation efficiency, adjust the 6 parameters of curve slope
appropriately to obtain best elevator operation curve when debugging in the actual situation.
To achieve the maximum level of comfort, integrated controller must control the motor and
make feedback speed strictly following the change of running curve.
Proportional gain on the speed circle F6-04 and integral gain F6-05 or F7-05~F7-12 for PI section
parameters also influence the motor tracking ability to speed curve. Generally, increasing the
proportion gain will improve the reaction of the system and promote the tracking speed. However, if
proportion gain is set too big, it will cause system vibration with high frequency and large motor
noise. Increasing integral gain can improve the system anti-interference/tracking ability and improve
the leveling precision but set integral gain too big will make system vibration, speed over adjustment
and wave vibration.
Generally, it is recommended to first adjust proportion gain, increase it right before system
vibration threshold. Then adjust the integral gain, enable system with quick reaction and no over
adjustment.
Chart 9.2 Speed Loop PI Recommend Value
Speed loop proportional/integral can be adjusted in 50 increments. If system performance is not
perfect at start or stop period (low speed period), try to control in multi-section PI. Detailed method
in description section of specific section is in instruction.