MAINTENANCE
OPERATOR MANUAL
45
P20PS
46
OM-P20PS2019001-EN
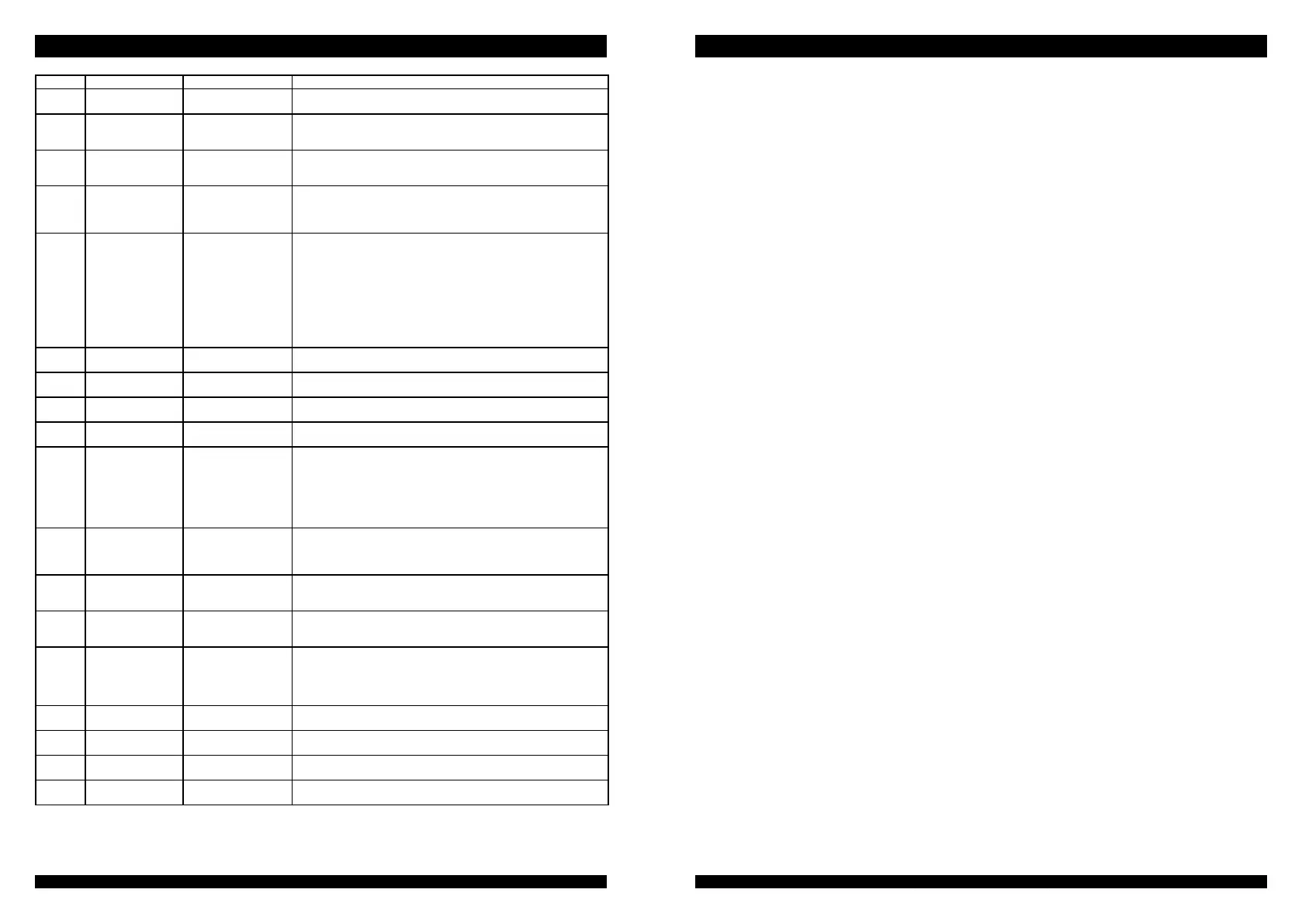
06A29 ANT. MISSING
06A0 WAITING DATA Waiting for data 1.Check if the CAN BUS communication line is connected properly;
2.Check if the bit rate of the communication is consistent;
06A0 EPS NOT ALIGNED Waiting for data
1.Check if the zero proximity switch is installed properly;
2.Check if the zero proximity switch is correctly selected;
3.Check if the output data of zero proximity switch is correct;
06A0 WAITING FOR TRAC Waiting for towing controller
1.Check if the CAN BUS communication line is connected properly;
2.Check if the connection line of interlock switch is correct;
3.If the interlock switch is controlled by tiller, set TILLER SEITCH as HANDLE;
06A0 KEYOFF Key switch voltage low
1.Check if the key switch voltage receives a low voltage pulse when turning on the external
load;
2.Check if B+ and B- are rmly connected to the controller;
3.If the fault is reported every time the key is turned on, replace the controller;
06A25 ENCODER ERROR Encoder fault
The controller detects that two successive speed readings of the encoder differs greatly from
each other. A normal encoder in the system cannot change speed readings greatly within a
very short time. Hence, a possible cause for the symptom is that the wires of one or more
encoders are worn or broken. Check the mechanical and electrical parts of the encoder.
Another possible for the symptom is electromagnetic interference from the sensor bearing. If
the symptom is not due to the two causes, replace the controller.
Note: Sometimes manual operations may also cause this fault indicating on the controller. In
these cases, it is required to turn off power supply and start the forklift again. For example:
1.The forklift suddenly collides with an obstacle so that it is incapable of travelling;
2.The driver applies the brake sharply while the forklift is travelling at a high speed.
06A7 Q LINE SENSOR KO Step motor Q LINE voltage
failure
1.Check if the stepper motor cable is intact;
2.Resistance between Q line and B- too small (Approaching 30Ω);
06A6 D LINE SENSOR KO Step motor D LINE voltage
failure
1.Check if the stepper motor cable is intact;
2.Resistance between D line and B- too small (Approaching 30Ω);
06A27 GAIN EEPROM KO EEPROM memory current
value is different
Replace the controller;
06A11 DATA ACQUISITION Data collection Activation of this fault indicates data acquisition is under way. Wait data acquisition is
completed.
06A24 MICRO SLAVE KO Main and slave microprocessor
detection does not match
1.When using a stepper motor, the direction of the stepper motor detected by the main
microprocessor and slave microprocessor is inconsistent;
2.In the closed-loop control system, the direction of the stepper motor detected by the main
contactor is incorrect and is inconsistent with the direction of the stepper motor detected by
the slave contactor;
3.The main contactor did not detect the steering limit position, but it was detected by the
slave contactor;
06A28 CAN BUS KO CAN BUS communication fault
1.Check if the CAN BUS communication line is connected properly;
2.Check if the bit rate of the communication is consistent;
3.Check if the CAN communication is open;
4.Check if the CAN communication loop resistance is 60Ω.
06A22 S.P OUT OF RANGE Output steering potentiometer
out of range
If a single potentiometer, such as CPOC1 end, is out of range 0.8V-4.2V, it will alarm. When
the dual potentiometer is selected, the sum of the two sliding ends (CPOC1+CPOC2) is out
of the range of 4.4V-5.5V and it will alarm. Check the connection of potentiometer.
06A23 F.B OUT OF RANGE Feedback of steering motor
encoder out of range
Feedback potentiometer (CPOT connecting to CNB#6) has fault, it will alarm. The range of
CPOT is out of 0.3V-4.7V, it will alarm. Check if the steering motor encoder is connected
correctly and whether there is a open circuit;
06A21 MICRO SLAVE The information on the
status bus between the main
microprocessor and slave
microprocessor is frozen to the
OXFF value.
The controller should be replaced;
06A19 KM OPEN Main contactor of slave
contactor open
Slave contactor monitors the open of safety contactor of main contactor, and the controller
needs to be replaced;
06A18 KS OPEN Safety contactor of slave
contactor open
Main contactor monitors the open of safety contactor of slave contactor, and the controller
needs to be replaced;
06A17 KM CLOSED Safety contactor of main
contactor closed in advance
Slave contactor monitors the advanced close of safety contactor of main contactor, and the
controller needs to be replaced;
06A16 KS CLOSED Safety contactor of slave
contactor closed in advance
Main contactor monitors the advanced close of safety contactor of slave contactor, and the
controller needs to be replaced;