24V
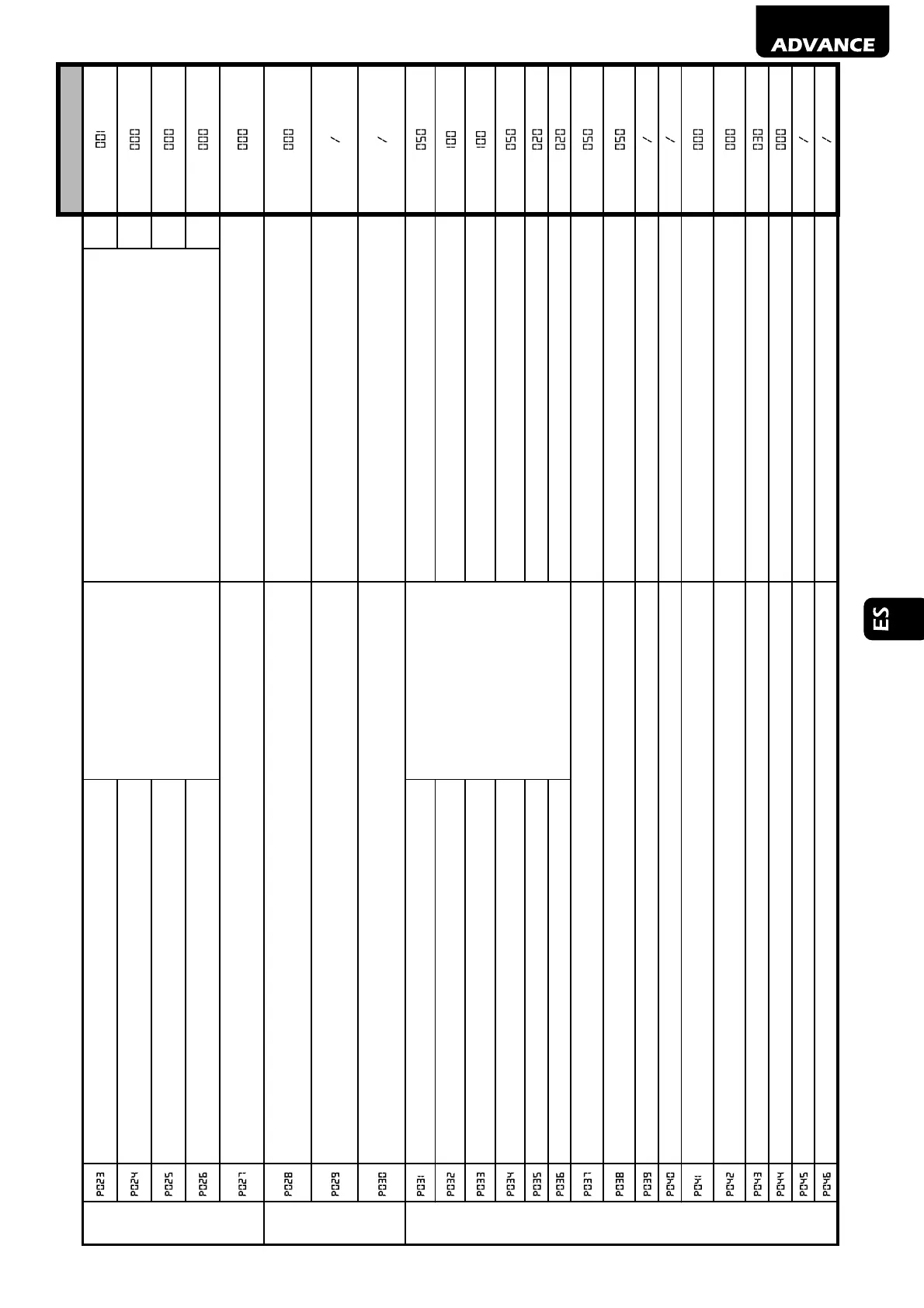
PARÁMETROS DE
CONFIGURACIÓN DE LAS ENTRADAS
Asignación CANAL 1 controles remotos
Atención: las funciones OPEN_PM y
CLOSE_PM no están disponibles con la
codi! cación programada HCR Rolling
Code (P027=1)
• 000: NONE (no utilizado)
• 001: START (arranque)
• 002: PEDESTRIAN (peatonal)
• 003: OPEN (apertura separada)
• 004: CLOSED (cierre separado)
• 005: OPEN_PM (apertura con hombre presente)
• 006: CLOSED_PM (cierre con hombre presente)
• 007: ELOCK_IN (salida 2 con! gurable. Ver P062)
• 008: AUX_IN (salida 1 con! gurable. Ver P066)
CH1
Asignación CANAL 2 controles remotos CH2
Asignación CANAL 3 controles remotos CH3
Asignación CANAL 4 controles remotos CH4
Selección del tipo de control remoto
• 000: HCS ! x-code
• 001: HCS rolling-code
• 002: Dip-switch
PARÁMETROS
CONFIGURACIÓN MOTORES
Selección del tipo de motor
• 000: ADVANCE
No utilizado
No utilizado
PARÁMETROS DE FUNCIONAMIENTO
Regulación de la velocidad de los motores durante la desaceleración en apertura
Atención: modi! cando los valores de
estos parámetros, a la salida de la
modalidad de programación se solicitará
un nuevo aprendizaje de la carrera del
motor.
15%tot........................100%tot
Regulación de la velocidad de los motores durante la carrera de apertura 15%tot........................100%tot
Regulación de la velocidad de los motores durante la carrera de cierre 15%tot........................100%tot
Regulación de la velocidad de los motores durante la desaceleración en cierre 15%tot........................100%tot
Regulación de la duración de la desaceleración en apertura 0%tot............................80%tot
Regulación de la duración de la desaceleración en cierre 0%tot............................80%tot
Regulación de la fuerza del motor 1 en apertura
(si = 100% detección del obstáculo inhabilitada)
1%tot…...........................100%tot
Regulación de la fuerza del motor 1 en cierre
(si = 100% detección del obstáculo inhabilitada)
1%tot…...........................100%tot
No utilizado
No utilizado
Regulación del tiempo de cierre automático
(si = 0 cierre automático inhabilitado)
0sec...................................255sec
Regulación del tiempo de cierre automático peatonal
(si = 0 cierre automático peatonal inhabilitado)
0sec...................................255sec
Regulación de la duración de la carrera peatonal 5%tot…...........................50%tot
Regulación del tiempo de predestello 0sec…….10sec
No utilizado
No utilizado