Chapter 7 Motion Control Functions
6) Constant Speed Control: TYPE = 1
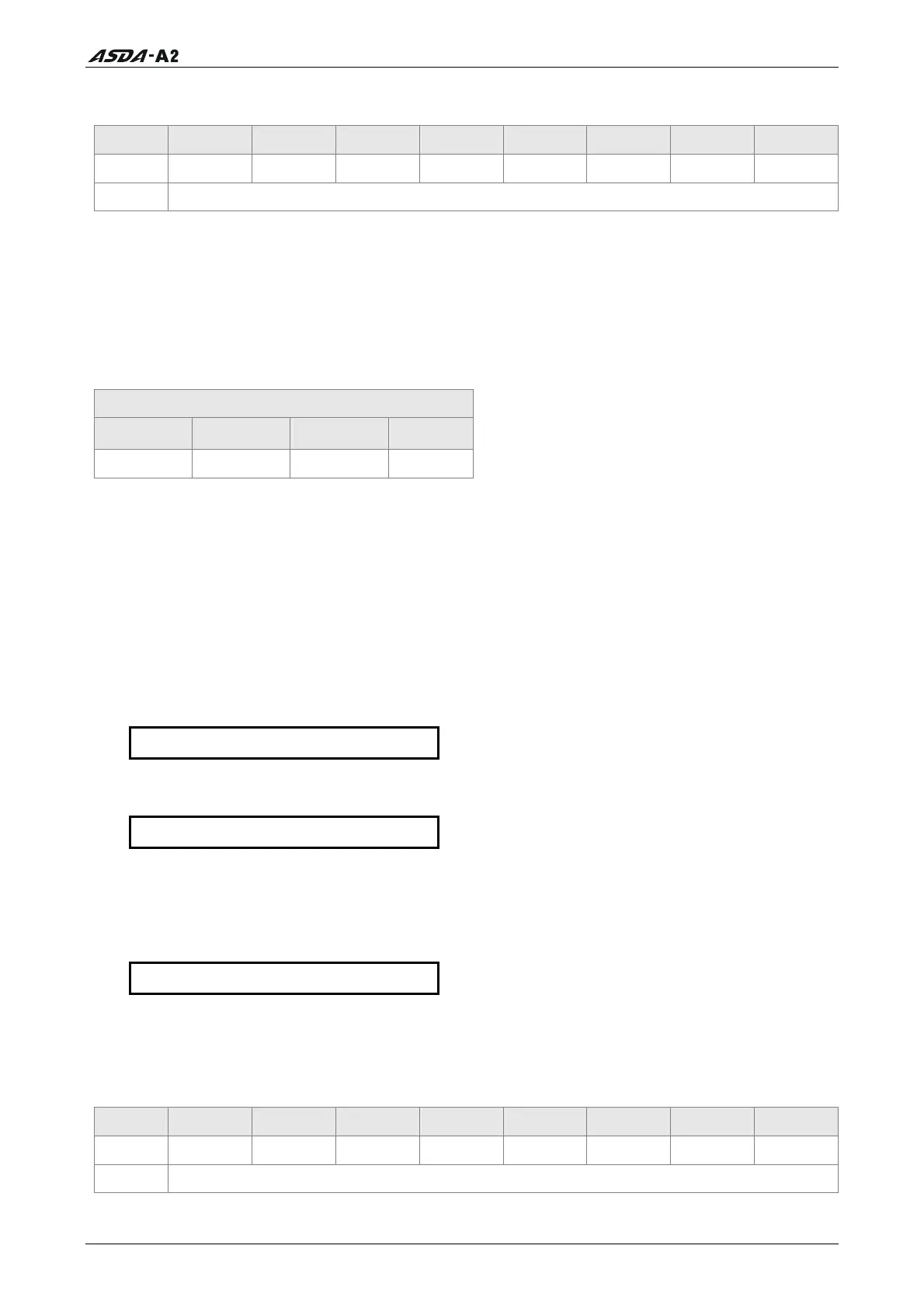
Bit
31 ~ 28 27 ~ 24 23 ~ 20
19 ~ 16
15 ~ 12
11 ~ 8 7 ~ 4 3 ~ 0
DW0 - - DLY - DEC ACC OPT 1
DW1 DATA (32 bit): Target speed. Unit: Defined by OPT.UNIT
When executing this command, the motor will accelerate or decelerate from current speed
(the value does not necessarily have to be 0.). Once the motor reach the target speed, it
indicates that this command is completed and the motor will continue running in this target
speed and will not stop.
OPT:
OPT
Bit 7 Bit 6 Bit 5 Bit 4
- UNIT
AUTO
INS
※ When the TYPE is set to 1 ~ 3, it can accept DO signals, STP (Motor Stop), SNL(SCWL,
Reverse Software Limit), SPL(SCCWL, Forward Software Limit).
INS: Insertion command on PR
AUTO: When current positioning is completed, the motor moves to the next dedicated PR
automatically.
UNIT: 0 ~ 1. 0: Unit is 0.1r/min 1: Unit is PPS(Pulse Per Second)
ACC / DEC: 0 ~ F. Accel / Decel time number (4 bits)
ACC / DEC (4)
Index P5-20 ~ P5-35
SPD: 0 ~ F. Target speed (4 bits)
SPD (4)
Index P5-60 ~ P5-75
DLY: 0 ~ F. Delay time number (4 bits). The digital output of this PR activates after the delay
time. External INS is not valid. The delay time number settings correspond with the parameter
P5-40 ~ P5-55.
DLY (4)
Index P5-40 ~ P5-55
7) Position Control: (TYPE = 2, Single positioning control. Motor stops when positioning is
completed. TYPE = 3: Auto positioning control. Motor goes to next dedicated PR when
positioning is completed.)
Bit
31 ~ 28 27 ~ 24 23 ~ 20
19 ~ 16
15 ~ 12
11 ~ 8 7 ~ 4 3 ~ 0
DW0 - - DLY SPD DEC ACC OPT 2 or 3
DW1 DATA (32 bit): Target position, Unit: Pulse of User Unit
7-20 Revision January 2011
Call 1(800)985-6929 for Sales
Call 1(800)985-6929 for Sales