Chapter 3 Connections and Wiring
Revision January 2011 3-53
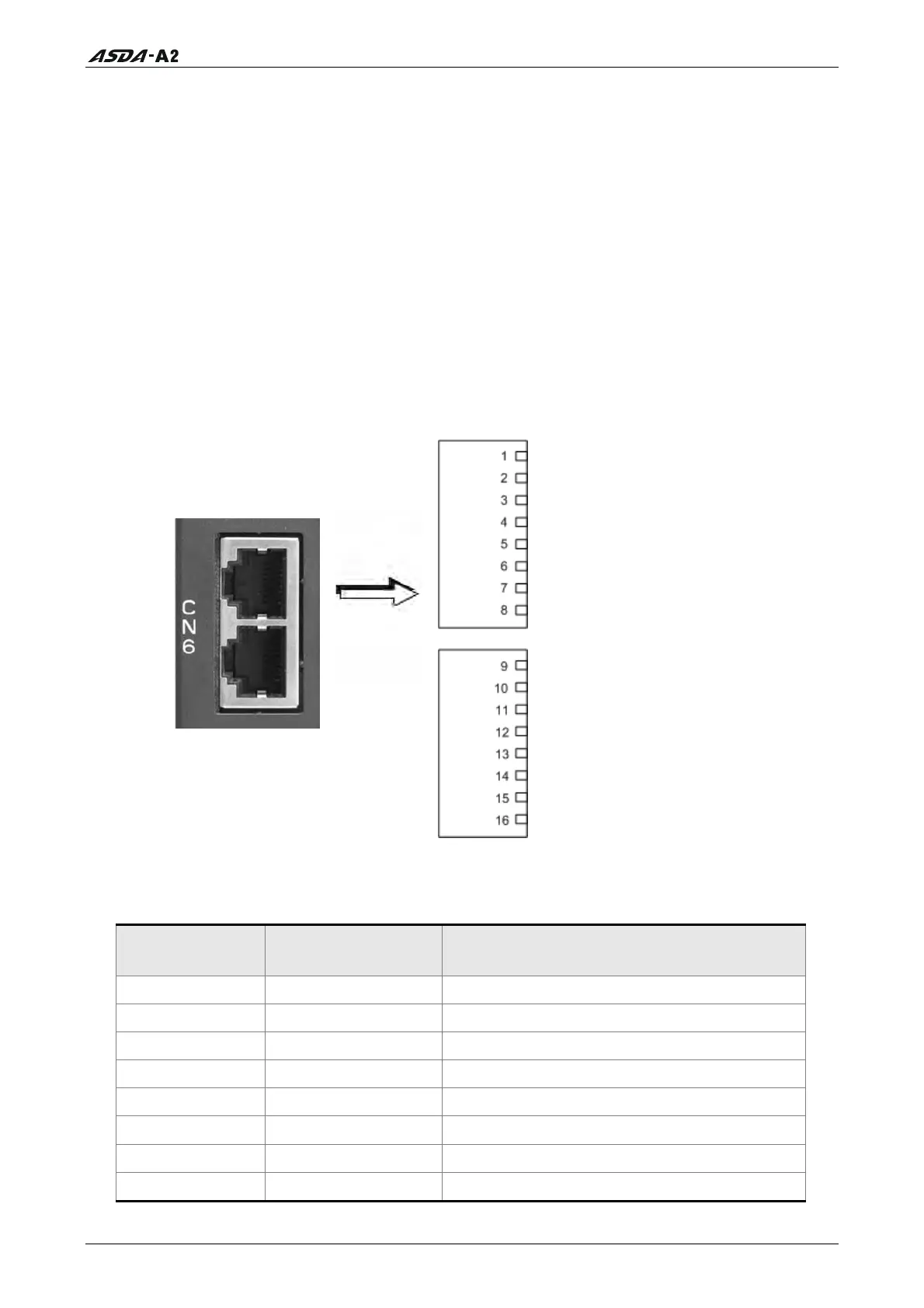
3.9 CANopen Communication Connector CN6
CANopen Communication Connector CN6 is designed in accordance with CANopen DS301
and DS402 implementation. With this connector CN6, the servo drive can be connected to a
CAN device so as to perform position, speed and torque control, or read and monitor the
status of the servo drive through CANopen communication.
The station numbers of CANopen communication are the same as RS-232 and RS-485
communication and all be determined by parameter P3-00. The transmission speed can be
reached up to 1Mbps. There are two communication ports of connector CN6, one is for
transmission and the other is for receiving, convenient for connecting to more than one servo
drives in serial. Ensure to connect a termination resistor to the last connected servo drive.
Figure 3.17 The layout of CN6 Drive Connector
CN6 Terminal Signal Identification
PIN No. Signal Name Description
1, 9 CAN_H CAN_H bus line (dominant high)
2, 10 CAN_L CAN_H bus line (dominant low)
3, 11 CAN_GND Ground / 0 V / V -
4, 12
-
Reserved
5, 13
-
Reserved
6, 14
-
Reserved
7, 15
CAN_GND
Ground / 0 V / V -
8, 16
-
Reserved
Call 1(800)985-6929 for Sales
Call 1(800)985-6929 for Sales