AX-3 Series Operation Manual
7-72
7.7.2.5 MC_GearIn
Use MC_GearIn instruction to control gear movement and cancel synchronization via MC_Gear Out instruction
In MC_GearIn, the master and slave axes, gear ratio numerator and gear ratio denominator, acceleration,
deceleration as well as jerk are specified.
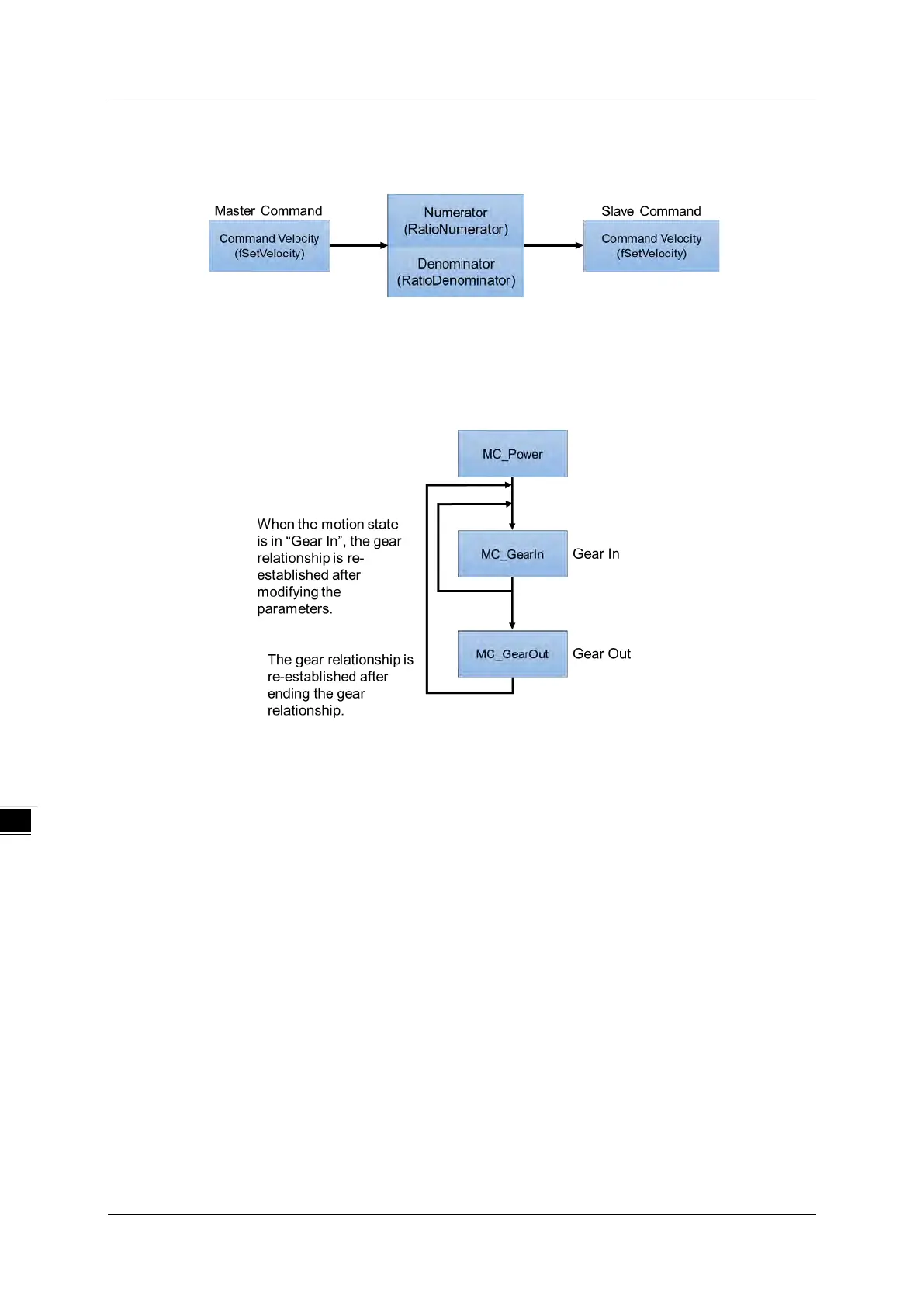
▓ The following diagram shows the execution steps of instructions for electronic gears:
● When executing MC_GearIn, the slave axis enters the state of synchronized motion, while for MC_GearOut
execution, the slave axis shifts awaya from sync state and maintains instant velocity to continue the movement
and enters the state of continuous motion.
● During synchronized motion, when executing MC_Stop on the slave axis, MC_GearIn is aborted while master
axis maintains the state of continuous motion and the slave axis enters to stopping state that will return to standstill
once MC_Stop is Done.
● When slave axis is in synchronized motion state, its velocity may alter according to the master axis velocity and
gear ratio.
● When both master and slave axes enters state of synchronization, use MC_SetPosition to prevent motors from
generating accidents due to high speed operation.
▓ Using RatioNumerator, RatioDenominator in MC_GearIn to setup the gear ratio between master and slave
axes.
- When gear ratio is positive, the master and slave axes are moving in the same direction.