Chapter 12 Description of Parameter SettingsC2000-HS
12.2-00-40
Load Operation Adjustment
11. Load operating test
B1. Low-frequency loading performance test (output frequency < 20% of rated speed):
a. If the frequency point is zero when switching I/F mode to PM Sensorless mode
(Pr.10-39=0Hz), increase the magnetic linkage estimated high-speed gain (Pr.10-54).
b. If the output frequency is less than the frequency point to switch from I/F mode to PM
sensorless mode, increase the d-axis current command of I/F mode (Pr.10-31).
B2. Acceleration performance test with load. Accelerate to the rated speed according to the
acceleration time under heavy load:
a. If the motor responses too slow or an over current occurs during the acceleration,
increase Pr.10-57 [phase locked loop (PLL) Ki].
12. Stability test at constant speed operation: if the motor operates stably at constant speed
c. If the motor output rotor speed presents periodic low-frequency wave, increase Pr. 10-34
(PM sensorless speed estimator low-pass filter gain), or adjust ASR parameters.
d. If the output frequency reflects high-frequency vibration, decrease Pr. 10-34 or Pr. 10-56
[phase locked loop (PLL) Kp].
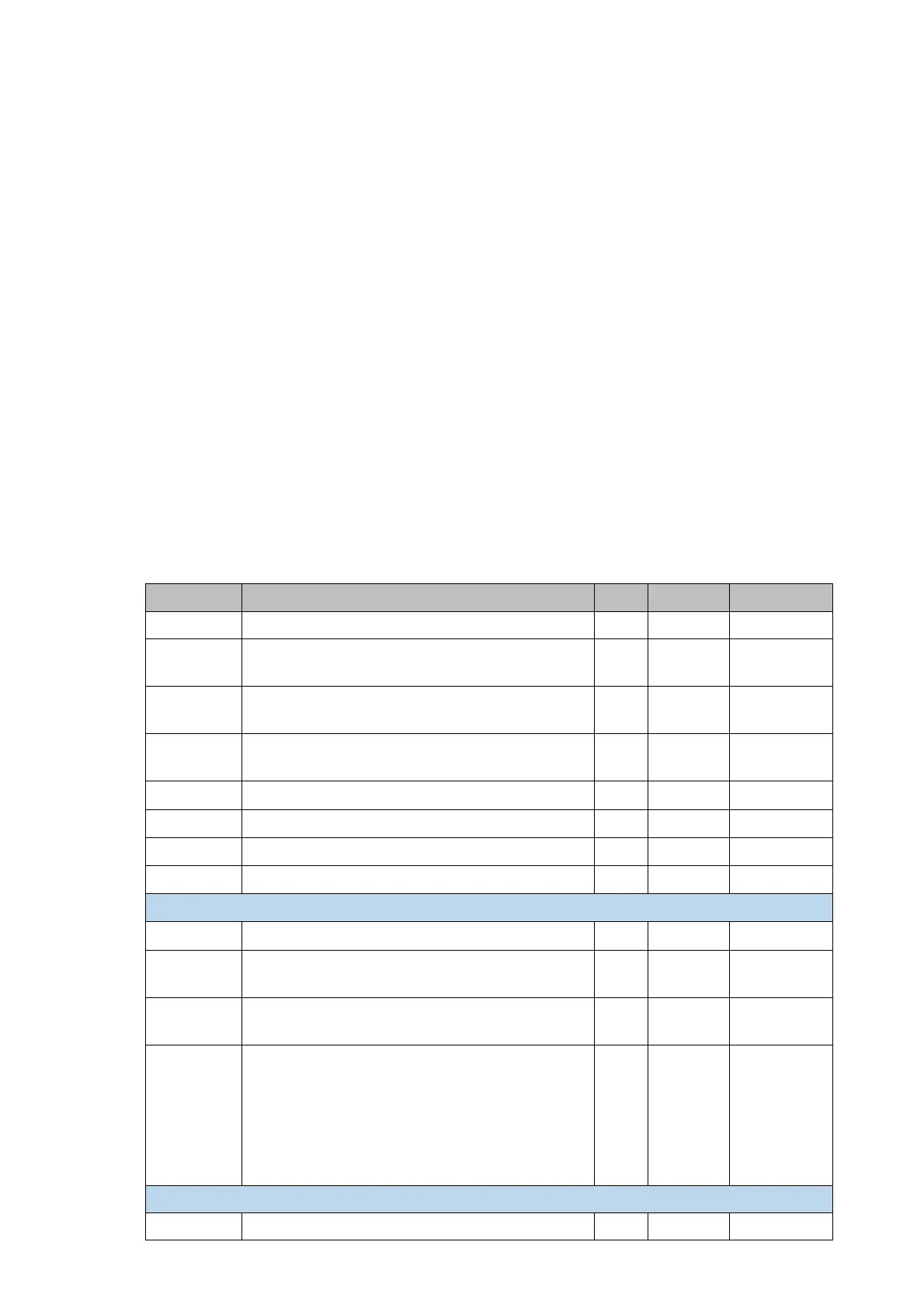
12-2-5-2 PM sensorless FOC Mode Related Parameters:
Refer to Section 12-1 Description of Parameter Settings for more details.
Parameter Description Unit Default Settings
Pr.10-31 I/F mode, current command % 40 150
Pr.10-34
PM sensorless speed estimator low-pass filter
gain
NA 1.00 0.00–655.35
Pr.10-39
Frequency point to switch from I/F mode to PM
sensorless mode
Hz 20.0 0.0–1500.0
Pr.10-40
Frequency point to switch from PM sensorless
mode to V/F mode
Hz 20.0 0.0–1500.0
Pr.10-54 Magnetic linkage estimator low-speed gain % 100 10–1000
Pr.10-55 Magnetic linkage estimator high-speed gain % 100 10–1000
Pr.10-56 Phase locked loop (PLL) Kp % 100 10–1000
Pr.10-57 Phase locked loop (PLL) Ki % 100 10–1000
Initial Angle Estimating Parameters
Pr.10-42 Initial angle detection pulse value NA 1.0 0.0–3.0
Pr.10-51
Injection frequency
(applicable when Pr.10-53=2)
Hz 500 0–1200
Pr.10-52
Injection magnitude
(applicable when Pr.10-53=2)
V 15.0/30.0 0.0–200.0
Pr.10-53
PM initial rotor position detection method
0: Disable
1: Internal 1/4 rated current attracting the rotor to
zero degrees
2: High frequency injection
3: Pulse injection
NA 0 0–3
Motor Performance Control Parameters
Pr.11-00 System control bit 0 0–8
 Loading...
Loading...