Chapter 12 Description of Parameter SettingsC2000-HS
12.2-00-35
2. PM Sensorless Adjustment (※ the number marked on the procedure corresponds the number
of following adjustment explanations)
I. PM Sensorless Adjustment Procedure
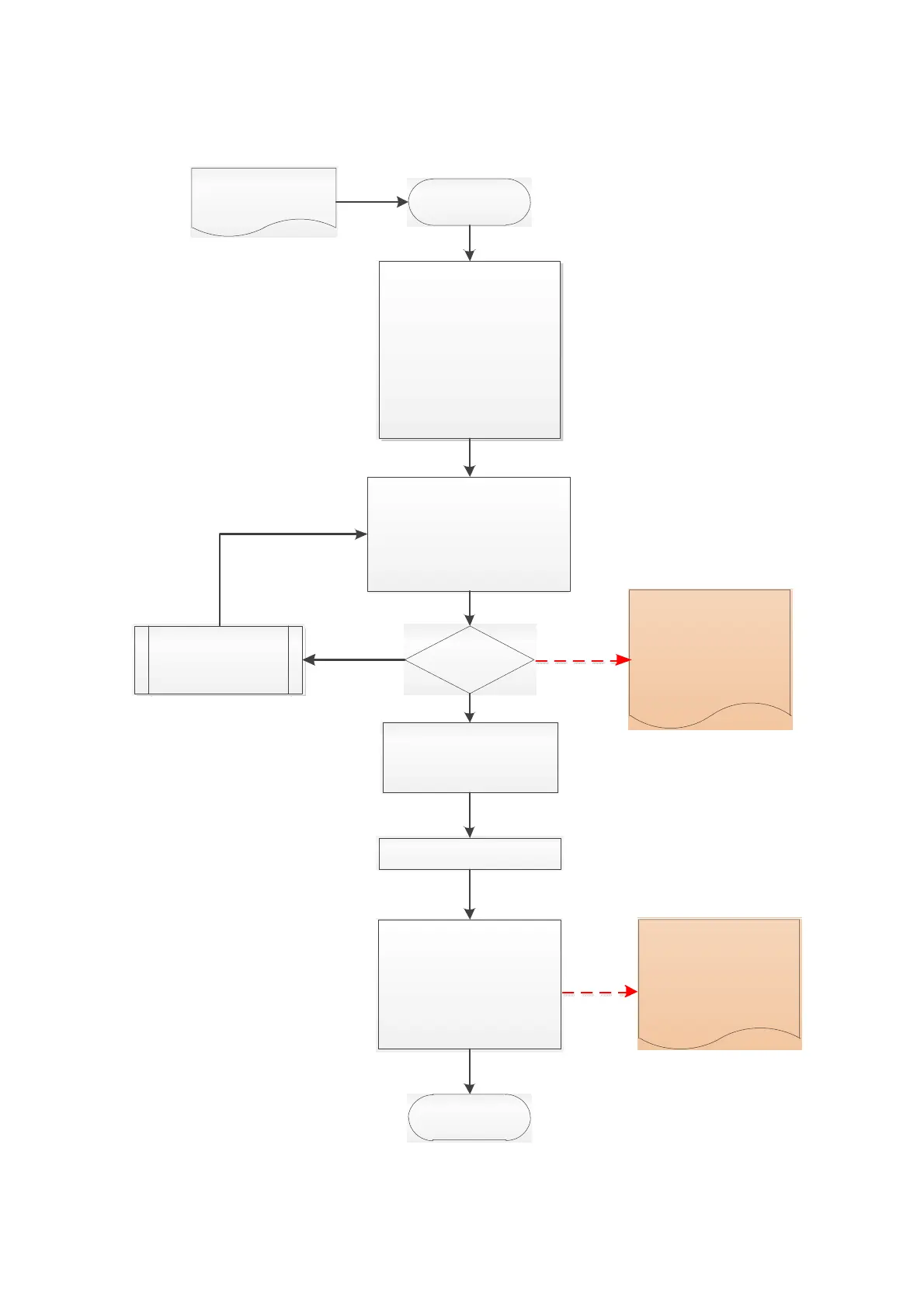
7.Initial Angle Detection
PMFOC mode set "6".
For IPM motor, set"2".
For SPM motor, set "3"
When both "2, 3" do not
perform well, then set “1”
8.No-load
Running
1.Parameter Reset
Pr.00-02=10
Pr01-01
額定頻率
Pr01-02
額定電壓
2.Pr.05-33 Motor type
=1(SPM) or 2(IPM)
3.Motor Parameter Setting
Pr.01-01 Rated Frequency
Pr.01-02 Rated Voltage
Pr.05-34 Full-load Current
Pr.05-35 Rated Power
Pr.05-36 Rated Rotor Speed
Pr.05-37 Motor Poles
4.Motor Parameter Auto-tuning
Pr.05-00=5
(PM dynamic auto-tuning)
or Pr.05-00=13
(PM static auto-tuning)
Press 'RUN’
PM Sensorless FOC
Adjustment Procedure
Motor
auto-tuning
successful?
1. AUE auto-tuning error
2. Measured resistance,
inductance or back
EMF error
Check Motor Parameters
Pr.05-38 PM system inertia
Pr.05-39 Rs stator resistance
Pr.05-40 Permanent magnet
motor Ld
Pr.05-41 Permanent magnet
motor Lq
Pr.05-43 Ke parameter
6.Cycle the power
YES
NO
5. Set Control Mode
Pr.00-10=0 Speed mode
Pr.00-11=6 PM FOC control
Pr.10-53 angle detection
0: Disable
1: Internal ¼ rated current
attracting the rotor to zero
degrees
2: High frequency injection (IPM)
3: Pulse injection (SPM)

 Loading...
Loading...