Chapter 16 PLC Function ApplicationsC2000-HS
16-124
API
TORQ
S1 S2
Drive torque control mode
263
P
Bit device Word device
16-bit command (5 STEP)
TORQ Continuous
execution type
TORQ P Pulse
execution type
32-bit command
- - - -
Flag signal: M1063
X Y M K H KnX KnY KnM T C D
S1 * * *
S2 * * *
Notes on operand usage: none
S1
: Torque command (numbered, no more than one digit).
S2
: Speed limit.
The TORQ command can control the drive torque command and speed limits; it also uses
special register control actions, such as:
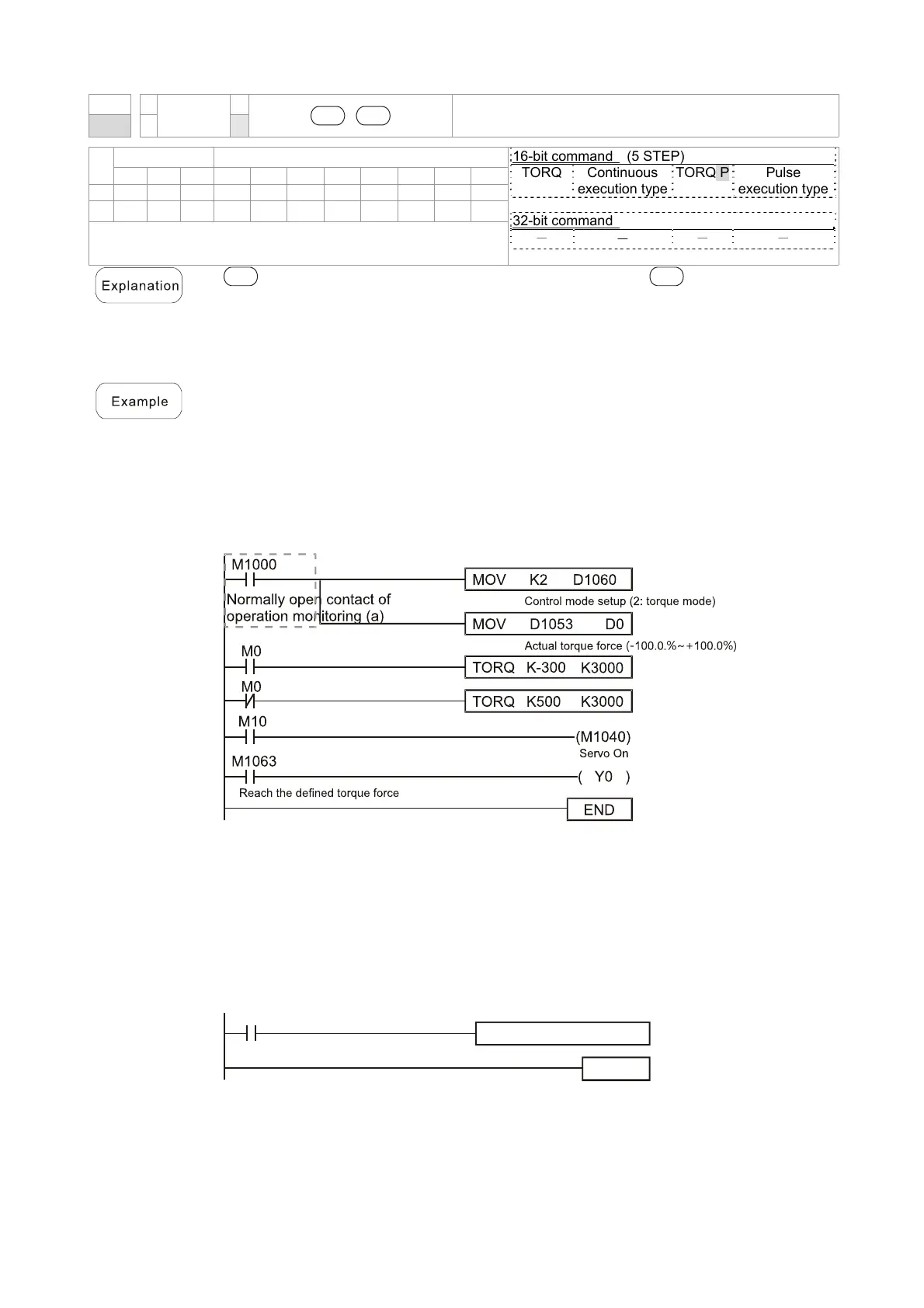
M1040: Controls Servo On/Servo Off. When Servo is ON, if a TORQ command is
executed, the torque will output the torque defined by the TORQ command, and the
frequency restrictions will similarly be controlled by the TORQ command.
M1040: Control Servo On/Servo Off. M1063: set torque attained. D1060 is the mode
controls. D1053 is the actual torque.
When M0=Off, set the drive torque command K+500 (+50.0%), rotational speed
restrictions is 3000 (30Hz).
When M0=On, sets the drive torque command K-300 (-30.0%), rotational speed
restrictions is 3000 (30Hz).
When M10=On, drive began output torque command.
When set torque is attained, M1063 will go On; this flag usually jumps continuously,
however.
Pr. 09-33 are defined on the basis of whether reference commands have been cleared
before PLC operation.
bit0: Prior to PLC scanning procedures, whether the target frequency has been cleared is
0. (This will be written to the FREQ command when the PLC is On)
bit1: Prior to PLC scanning procedures, whether the target torque has been cleared is 0.
(This will be written to the TORQ command when the PLC is On)
bit2: Prior to PLC scanning procedures, whether speed limits in the torque mode have
been cleared is 0. (This will be written to the TORQ command when the PLC is On)
Example:
M1
TORQ
K300
K400
END
If we now force M1 to be 1, the torque command will be K+300 (+30%), and the speed
limit will be 400 (40Hz). But when M1 is set as 0, there will be a different situation.
Case 1: When bit 1 and bit 2 of Pr. 09-33 are both set as 0, and M1 is set as 0, the torque
command will remain at +30%, and the speed limit will be set as 40Hz.
Case 2: When bit 2 of Pr. 09-33 are both 1, and M1 is set as 0, the torque command will
revert 0%, and the speed limit will be set as 0Hz.

 Loading...
Loading...